Segmented pose detection and docking device and method for large underwater robot
An underwater robot and docking device technology, which is applied to underwater operation equipment, transportation and packaging, ships, etc., can solve problems such as damage to the cabin structure and components in the cabin, large size, and difficulty in observing and judging the actual posture state. Achieve the effect of avoiding station transfer errors and efficient and accurate measurement methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] The present invention will be described in further detail below in conjunction with the accompanying drawings.
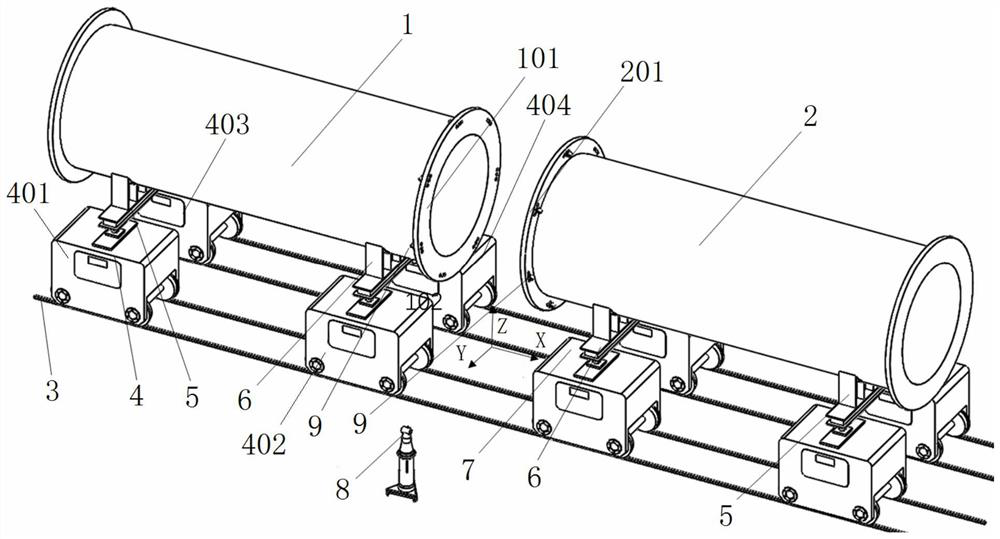
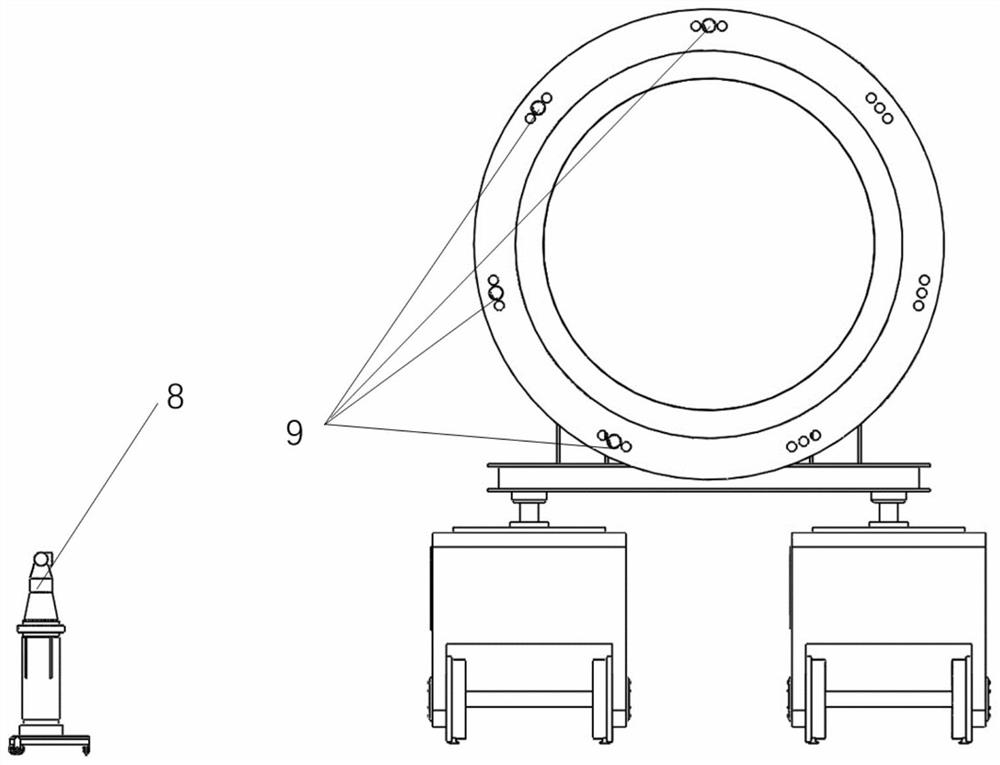
[0036] Such as Figure 1-7 As shown, the device of the present invention includes a first adjustment mechanism 4, a second adjustment mechanism 7, a track 3, a laser tracker 8, a target ball 9 and a control system, wherein the track 3 is arranged along the X direction, and the first adjustment mechanism 4 The structure is the same as that of the second adjustment mechanism 7, and both include a front support 6, a rear support 5 and four trolleys that move along the corresponding rails 3 respectively, and a traversing seat that moves along the Y direction is provided in the trolley, and The traversing seat is provided with a support shaft that moves up and down along the Z direction, the two ends of the front support 6 are respectively supported by the support shafts on the two trolleys on the front side, and the two ends of the rear support 5 are respectively...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com