Automatic parking sensing method integrating look-around image and laser radar
A laser radar and automatic parking technology, which is applied in image enhancement, image analysis, image data processing, etc., can solve the problems of accumulated errors, obstacles can only be stopped, and the existence of blind spots in perception, so as to improve intelligence and Robustness, improved field of view, and simplified tracking algorithm effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
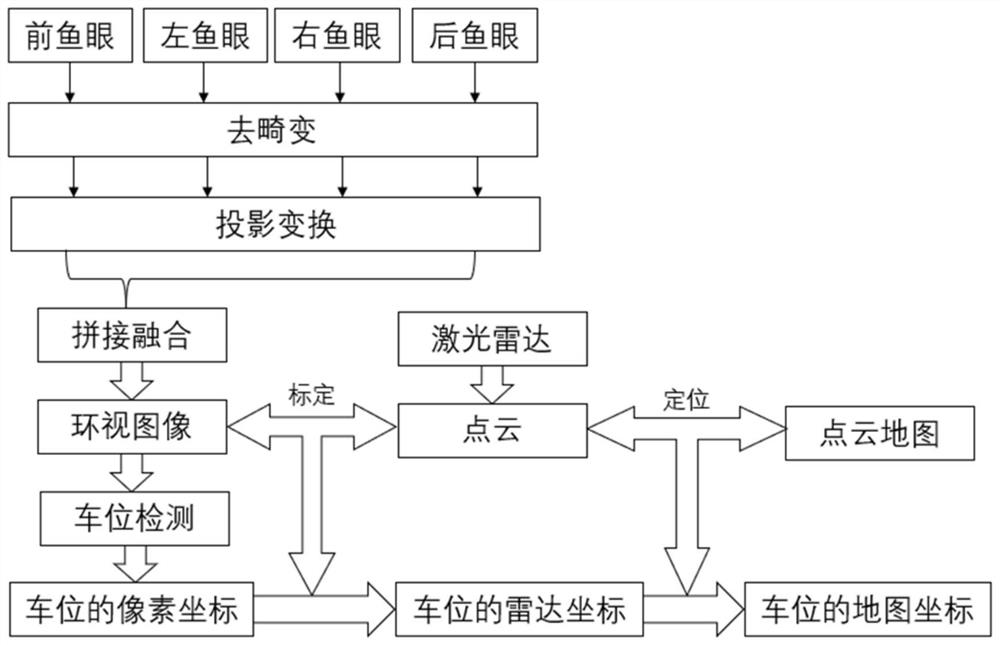
[0061] The invention discloses an automatic parking perception method for fusing a surround-view image and a laser radar. The method includes the following steps:
[0062] Step 1: Obtain the original image through four fisheye cameras installed on the car, and perform distortion correction on the original image;
[0063] Step 2: By selecting four marked points with known ground coordinates, respectively perform projection transformation on the original image after distortion correction, and obtain four bird's-eye views projected onto the ground;
[0064] Step 3: Based on the consistency of the spatial position of the marker points, the four bird's-eye views are stitched together to obtain a look-around image;
[0065] Step 4: Input the surround view image into the parking space detection model for parking space detection, and obtain the pixel coordinates of the parking space;
[0066] Step 5: Obtain the global coordinates of the parking space according to the pixel coordinate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com