
Patsnap Eureka
For R&D, Patsnap Eureka makes reading and utilizing patents & technical documents easy.
Patsnap Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Patsnap Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Combined satellite simulator control method based on discrete high-order all-drive system method
A technology of satellite simulation and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of cumbersome process, no experimental link, difficult to realize, etc., to achieve simple model processing process and design structure. Simple and effective, the effect of sufficient design freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
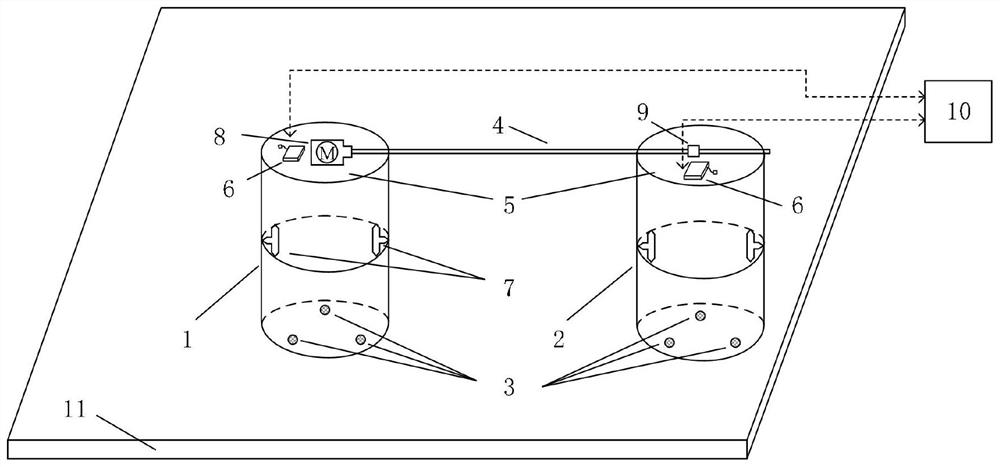
[0094] Specific implementation mode one: as figure 1 As shown, this embodiment discloses a method for controlling a combined satellite simulator based on a discrete high-order full-drive system method, and the method includes the following steps:
[0095] Step 1: Establish a discrete high-order full-drive system model for the combined satellite simulator system in the laboratory;
[0096] First, the continuous-time second-order all-drive system form of the combined satellite simulator system is given as follows:
[0097]
[0098] In formula (1), Represents the state vector, where: x c Indicates the x-coordinate of the centroid of the combined satellite simulator, y c Indicates the y-coordinate of the centroid of the combined satellite simulator, represents the yaw angle of the combined satellite simulator, T means transpose, u=[F x f y T z ] T Indicates the control input vector in the inertial coordinate system, where: F x Indicates the thrust acting in the x ...
Embodiment 1
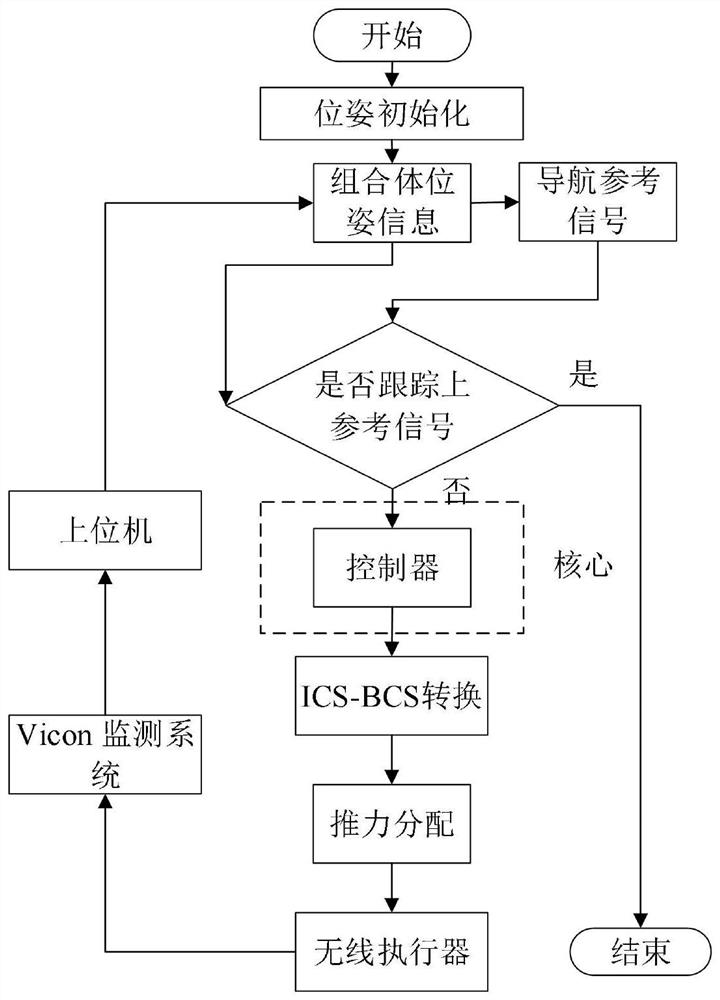
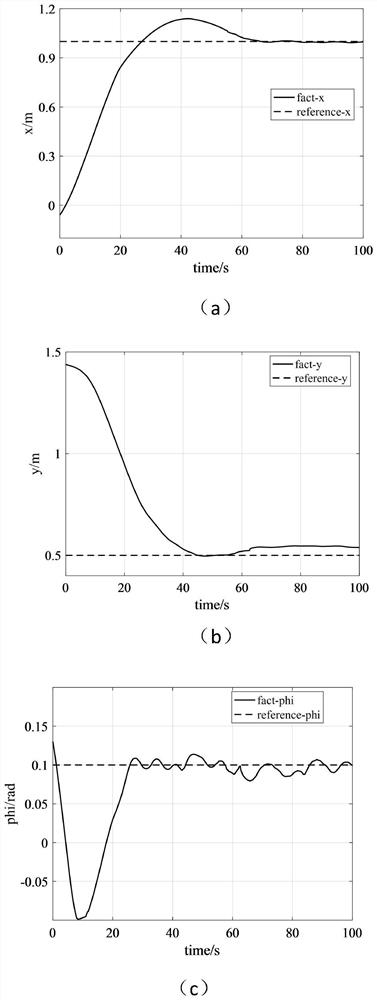
[0173] This embodiment proposes a combined satellite simulator control method based on the discrete high-order full-drive system method, in order to provide a control method for the combined satellite simulator to track a constant value signal after the simulated service star captures the target star, so its The application scenario is the research field of motion control of combined satellite simulators. At present, the control method has successfully completed the experimental verification on the basis of simulation analysis. For the application scenario where the integrated satellite simulator system tracks a specific constant value signal, the specific implementation method and experimental results for completing the experimental verification are given below.
[0174] When carrying out the experimental link of the combined satellite simulator system, the specific implementation method includes the following three steps:
[0175] Step 1: Take the combined satellite simulat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com