Self-following method and automatic following device
A technology of automatic following and horizontal direction, applied in the direction of finding the target control, etc., can solve the problem of unusable, etc., and achieve the effect of low cost and good environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
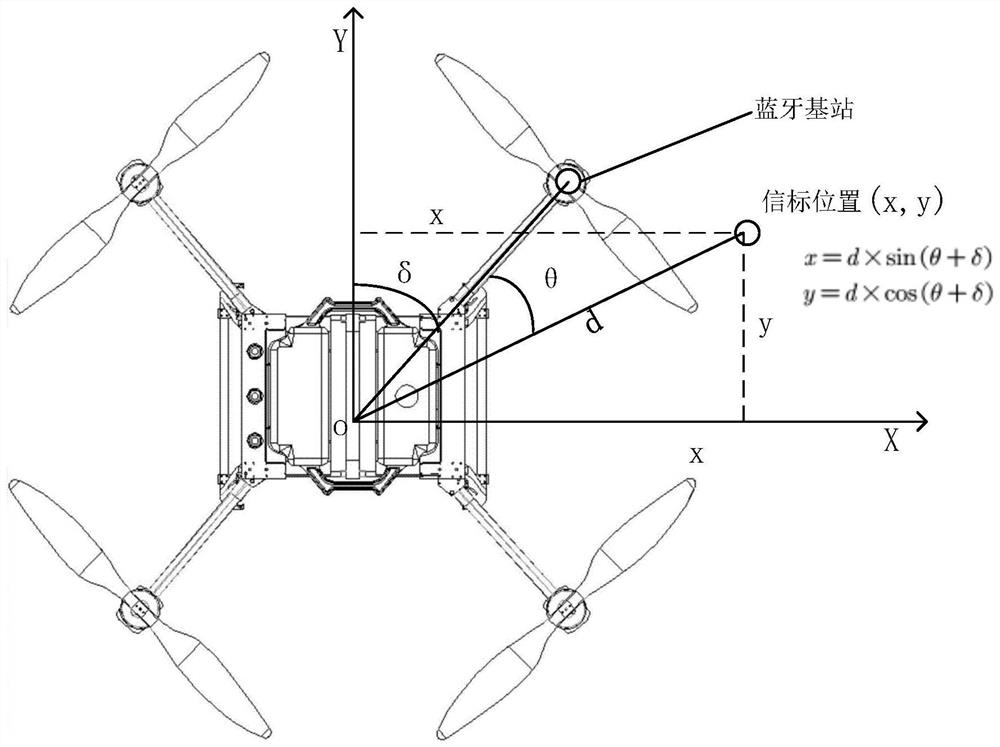
[0020] In order to better understand the solution of the present invention, the present invention will be further described in detail in conjunction with the invention of an unmanned aerial vehicle (that is, an automatic follower device) that adopts the method of the present invention.
[0021] A drone that includes a Bluetooth base station for connection to a mobile Bluetooth module, a barometer, and an accelerometer. During specific implementation, the mobile bluetooth module can be an unmanned aerial vehicle remote control integrated with a bluetooth module, or a smart device such as a bluetooth headset, a bluetooth bracelet, or a mobile phone with a bluetooth module. Since bluetooth earphones, mobile phones, and bluetooth bracelets are all popular commodities, the per capita possession rate is relatively high. Therefore, in this embodiment, the bluetooth base station is used as the signal receiving base station configured on the automatic follower device, and the bluetooth ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com