Line trajectory prediction method and terminal
A trajectory prediction, line technology, applied in the direction of instrument, electrical digital data processing, data processing input/output process, etc., can solve problems such as delay, achieve the effect of eliminating delay and solving delay problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0095] Please refer to figure 1 , Embodiment 1 of the present invention is:
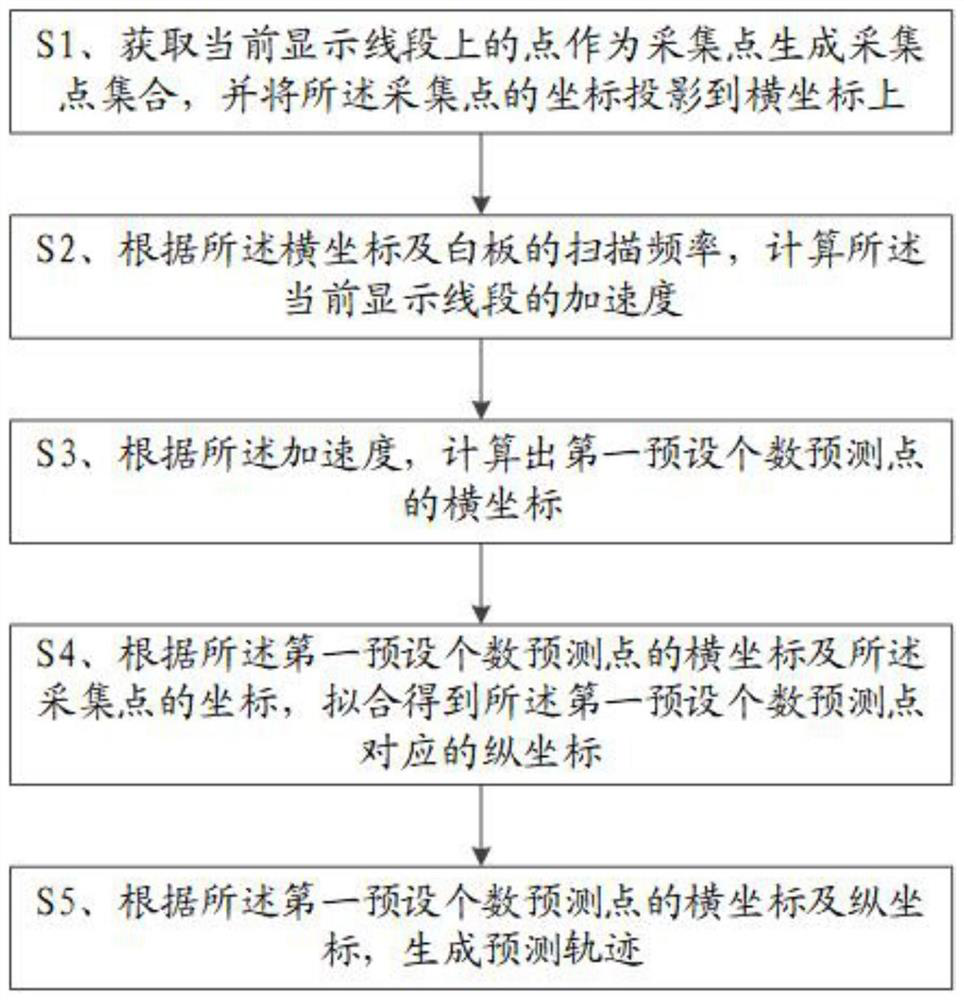
[0096] A line trajectory prediction method, specifically comprising:
[0097] S1. Obtain points on the currently displayed line segment as collection points to generate a collection point set, and project the coordinates of the collection points onto the abscissa;
[0098] Among them, the points on the currently displayed line segment are obtained as the collection points to generate the collection point set as follows:
[0099] S11. Presetting the sliding window, obtaining all points on the current display line segment passed by the sliding window as historical points, and judging whether the number of historical points exceeds a threshold, and if so, execute S12;
[0100] Specifically, a sliding window W is set, the value of W |W|=7, a counter Count is set to calculate the number of historical points, every time a new point is added in the sliding window, the value of the Count is +1, and the val...
Embodiment 2
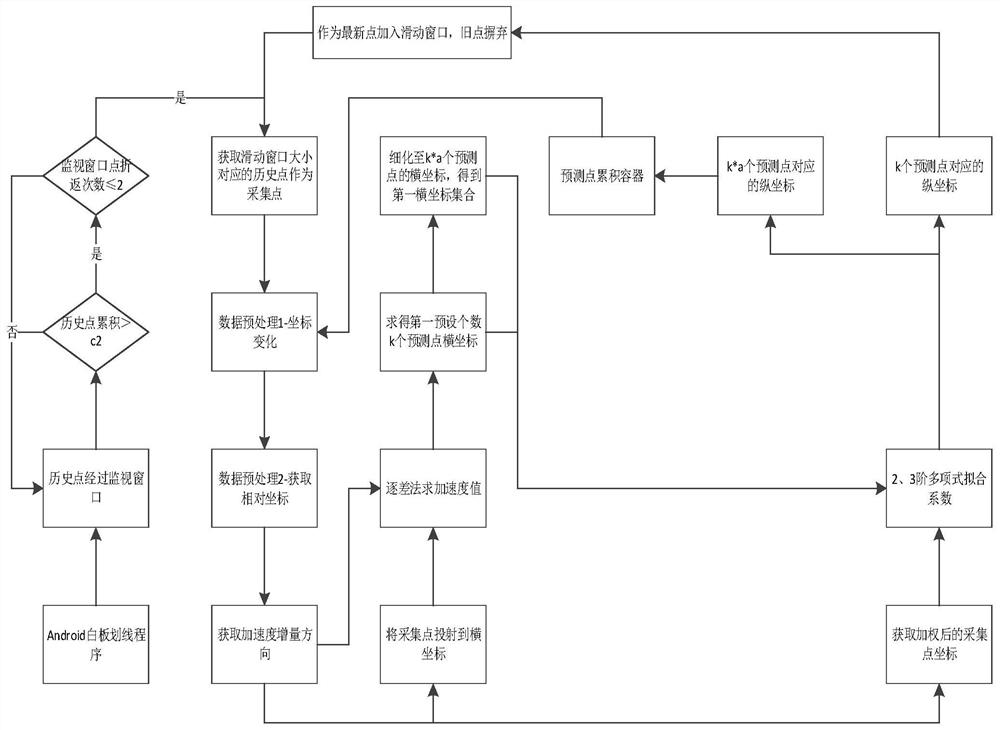
[0123] Please refer to image 3 , the second embodiment of the present invention is:
[0124] A line trajectory prediction method, which differs from Embodiment 1 in that:
[0125] The S2 is specifically:
[0126] Obtaining the last collection point and the penultimate collection point in the sorted collection point set, subtracting the abscissa of the last collection point from the abscissa of the penultimate collection point, Get the direction of acceleration;
[0127] For example, the set of collection points is {p0(x0,y0), p1(x1,y1), p2(x2,y2), p3(x3,y3), p4(x4,y4), p5(x5,y5), p6( x6,y6)}, calculate Δx=x6-x5, if the Δx>0, then the incremental direction is positive, that is, the acceleration direction is the positive direction of the abscissa; if Δx<0, then the incremental direction is negative, that is The acceleration direction is the negative direction of the abscissa;
[0128] Obtain the refresh frequency of the whiteboard and the interval between every two collect...
Embodiment 3
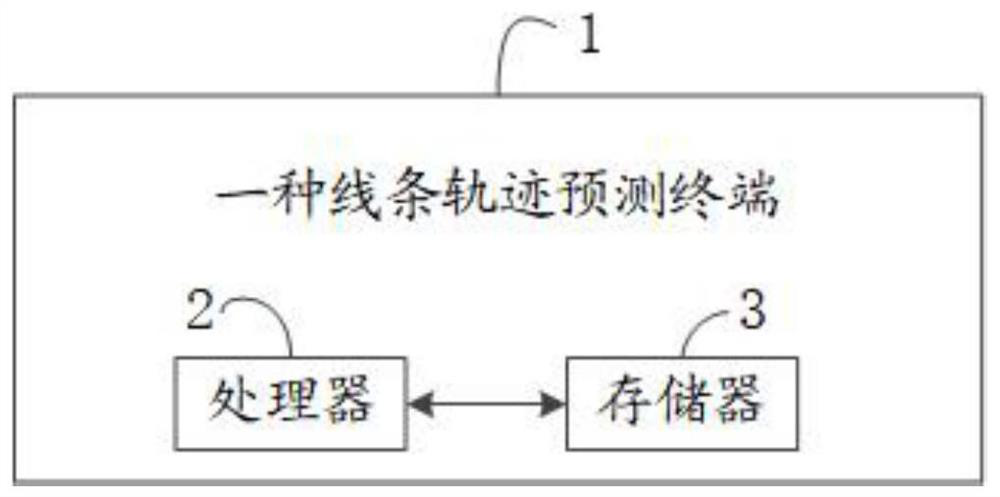
[0156] Please refer to figure 2 , Embodiment three of the present invention is:
[0157] A line trajectory prediction terminal 1, the terminal 1 includes a processor 2, a memory 3, and a computer program stored on the memory 3 and operable on the processor 2, when the processor 2 executes the computer program Each step in Embodiment 1 or Embodiment 2 is realized.
[0158] To sum up, the present invention provides a line trajectory prediction method and terminal. By setting a sliding window, the collection points in the sliding window are projected onto the abscissa, and the whiteboard refresh frequency is fixed according to the collection points. The abscissa of the currently displayed line segment is obtained from the acceleration of the currently displayed line segment, and the abscissa of the preset number of predicted points is obtained according to the acceleration, and then the ordinate corresponding to the abscissa of the predicted point is obtained by fitting the cur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com