Non-linear system tracking control method with unknown gain and interference
A nonlinear system, tracking control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that the tracking control problem of nonlinear system has not been fully studied.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] Specific embodiments of the present invention will be described below in conjunction with the accompanying drawings, so that those skilled in the art can better understand the present invention. It should be noted that in the following description, when detailed descriptions of known functions and designs may dilute the main content of the present invention, these descriptions will be omitted here.
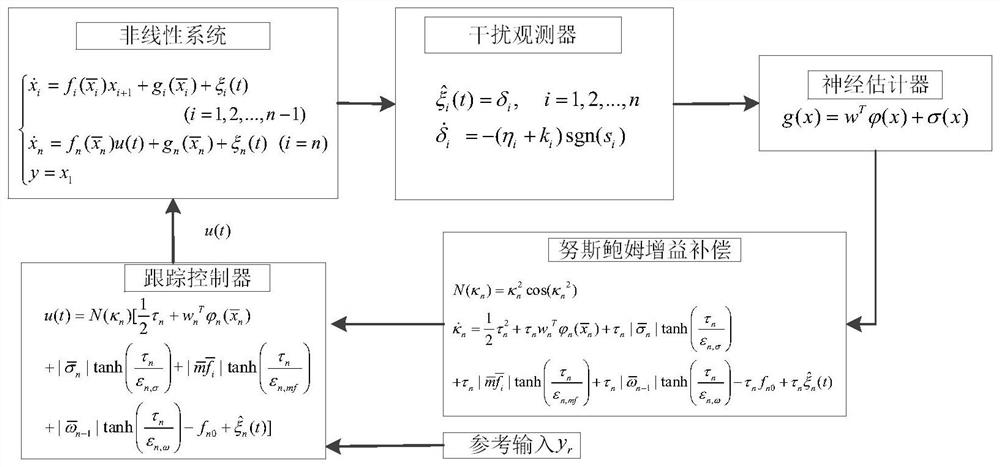
[0020] figure 1 It is a structural schematic diagram of a specific embodiment of the nonlinear system tracking control method with unknown gain and disturbance of the present invention.
[0021] Such as figure 1 As shown, the present invention relates to the design of disturbance observers containing nonlinear systems, the design of gain compensation algorithms based on Nussbaum's technique, and the design of tracking controllers based on backstepping.
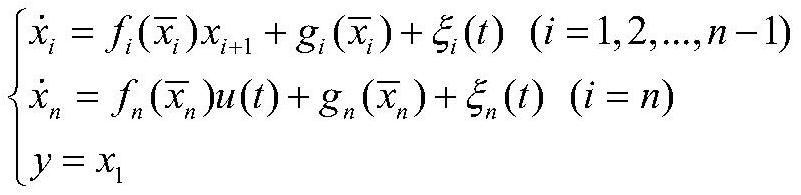
[0022] Consider the following nonlinear system
[0023]
[0024] where y∈R and u(t)∈R denote the output and input o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com