Human-computer interaction force identification and control method for rehabilitation walking training robot
A technology of walking training and control methods, which is applied in general control systems, adaptive control, control/regulation systems, etc., and can solve problems such as the difficulty in designing tracking controllers for rehabilitation walking training robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention is achieved through the following technical solutions:
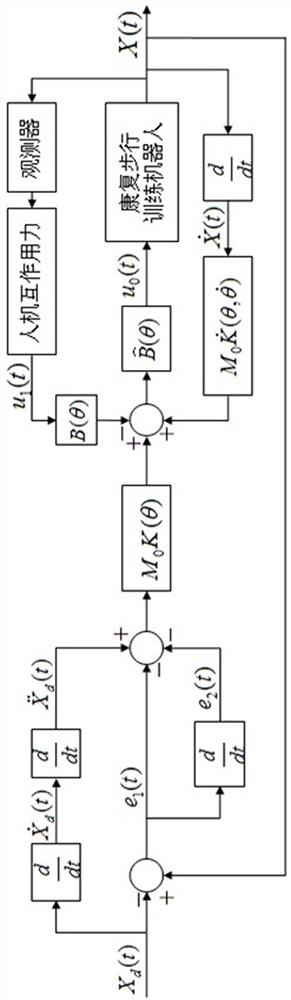
[0059] 1) Aiming at the generalized control input force in the dynamic model of rehabilitation walking training robot, it is decomposed into tracking control force and human-computer interaction force, and a robot system dynamic model with human-computer interaction force is obtained;
[0060] 2) Taking the human-computer interaction force as the extended state of the system, using the real-time position output of the robot, designing a system observer combining constant gain and time-varying gain to estimate the human-computer interaction force;
[0061] 3) Design the Lyapunov function based on the state observation error, trajectory tracking error and velocity tracking error to make the observation error system and tracking error system asymptotically stable; at the same time, obtain the solution method of the observer gain and human-computer interaction force, and according to the obtained ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com