Combined positioning method and system based on Chan's algorithm and Newton method
A combined positioning and algorithm technology, applied in the field of communication, can solve the problem of increasing positioning accuracy error, and achieve the effect of improving positioning accuracy and avoiding divergence problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
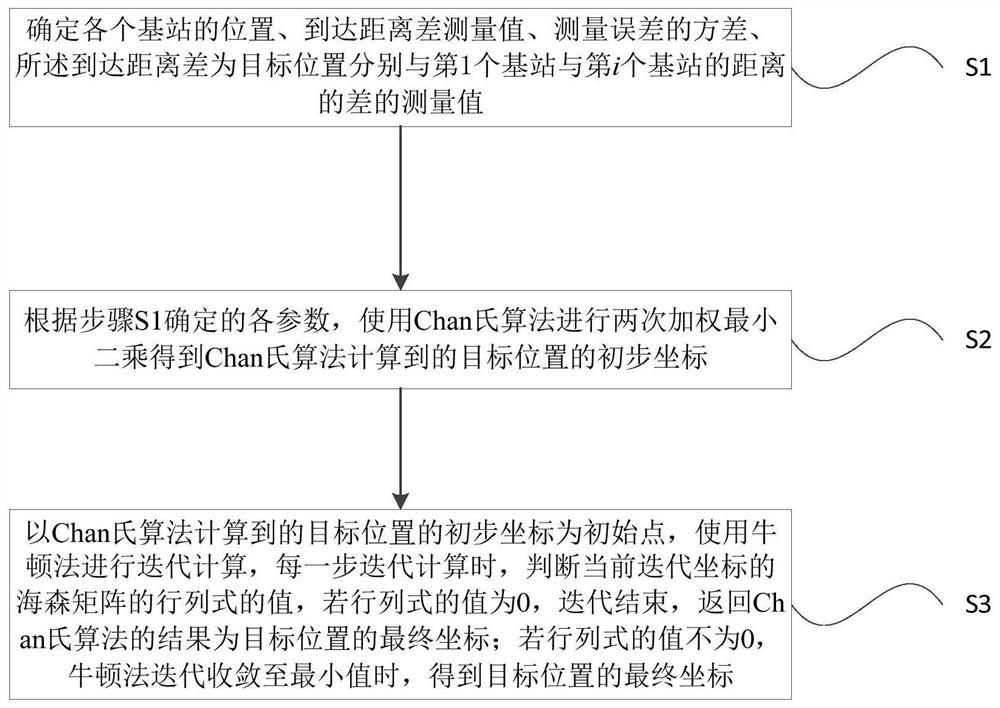
[0076] This embodiment provides a combined positioning method based on Chan's algorithm and Newton's method, such as figure 1 shown, including the following steps:
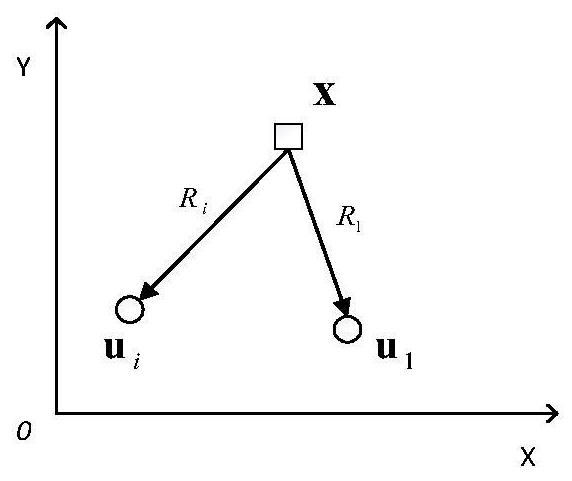
[0077] S1: Determine the location u of each base station i =[x i ,y i ] T ,i=1,...,M, the measured value of the distance difference d i1 ,i=1,...,M, variance σ of measurement error 2 , the arrival distance difference is the measured value of the difference between the target position and the distance between the first base station and the i-th base station;
[0078] S2: according to each parameter determined in step S1, use Chan's algorithm to carry out weighted least squares twice to obtain the preliminary coordinates of the target position calculated by Chan's algorithm;
[0079] S3: The Newton method module uses the preliminary coordinates of the target position calculated by Chan's algorithm as the initial point, uses the Newton method to perform iterative calculations, and judges the value of the determ...
Embodiment 2
[0133] This embodiment provides a combined positioning system based on Chan's algorithm and Newton's method, the system uses the method described in Embodiment 1, such as Figure 5 shown, including:
[0134] A parameter determination module, the parameter determination module is used to determine the position u of each base station i =[x i ,y i ] T ,i=1,...,M, measured value d of difference in arrival distance i1 ,i=1,...,M, variance σ of measurement error 2 , the arrival distance difference is the measured value of the difference between the target position and the distance between the 1st base station and the i-th base station;
[0135] Chan's algorithm module, said Chan's algorithm module uses Chan's algorithm to carry out twice weighted least squares and obtains the initial coordinates of the target position calculated by Chan's algorithm according to each parameter determined in step S1;
[0136] Newton's method module, described Newton's method module takes the pre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com