Main resonance control method of flexible mechanical arm
A flexible manipulator and control method technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem that the research on active control methods needs to be strengthened, and achieve the effect of improving dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described in detail below with reference to the accompanying drawings and specific examples, but the implementation of the invention is not limited thereto.
[0064] The present invention proposes a method of flexible mechanical arms, a combination of resonance mechanism, a main resonance mechanism, and a saturation mechanism to achieve vibration control of the robot arm.
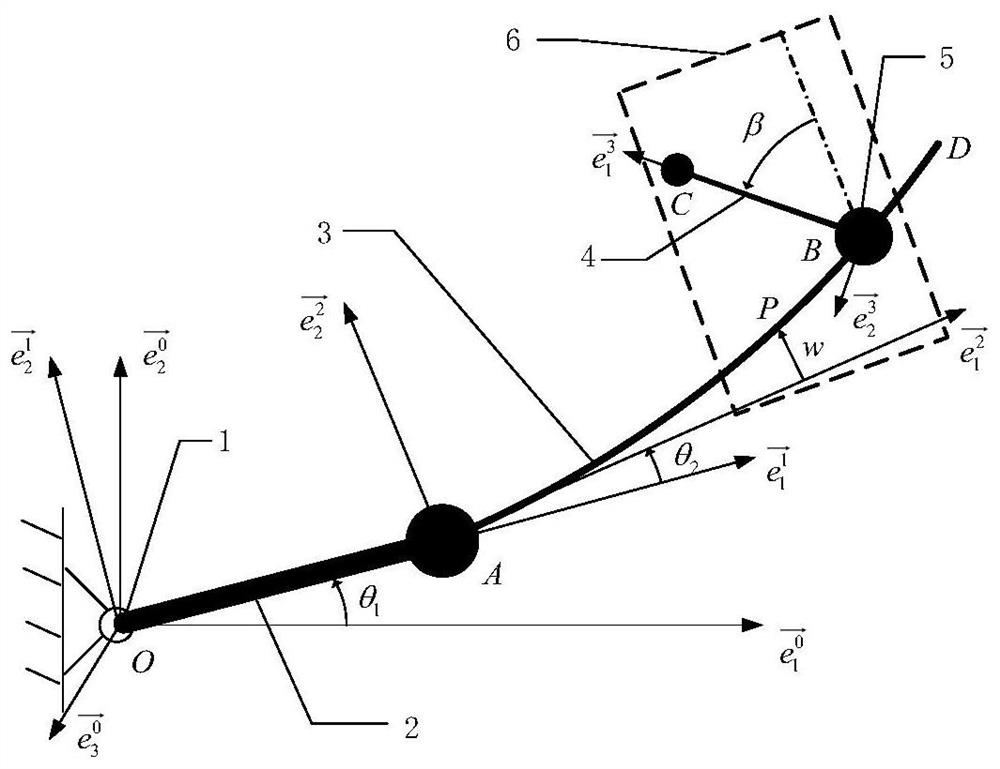
[0065] Among them, nonlinear dynamics modeling, main resonance analysis, and saturation mechanism analysis of the flexible robotic arm containing the enharper. In order to clearly clearly explain the main coincidence inhibition method proposed by the present invention, figure 1 The simplified model is used instead of the specific flexible robotic arm model.
[0066] The specific steps are as follows:
[0067] Step 1: Reasonably assume the flexible robot arm and joint; assuming that the material of the flexible robotic arm is uniform, the material is the same - the st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com