Knee joint active flexion and extension function exercise robot used after artificial total knee replacement
A total knee replacement and knee joint technology, applied in the field of exercise robots, can solve problems such as insufficient leg fixation, and achieve the effect of easy recovery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
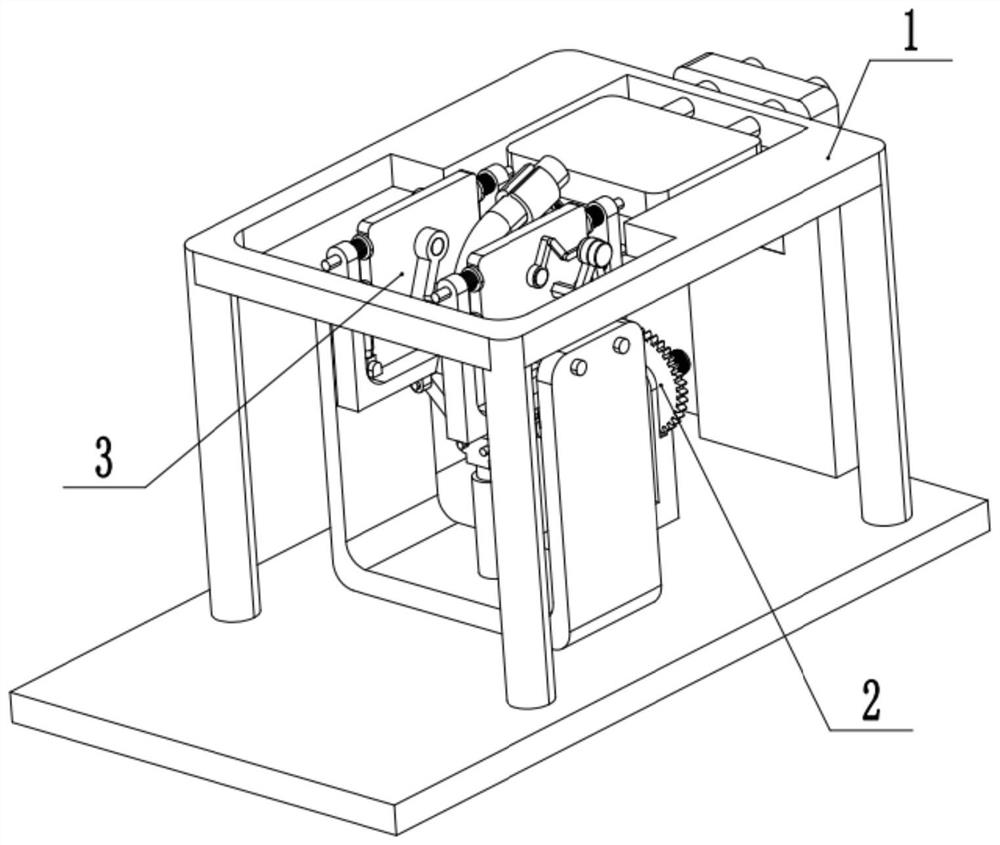
[0021] Example: Reference figure 1 Shown is an exercise robot with active flexion and extension function of the knee joint after artificial total knee replacement, including a base 1, an exercise device 3 installed on the front end of the base 1 for clamping and driving the calf movement, and the middle end is provided with a device for clamping the thigh The thigh clamping device 2.
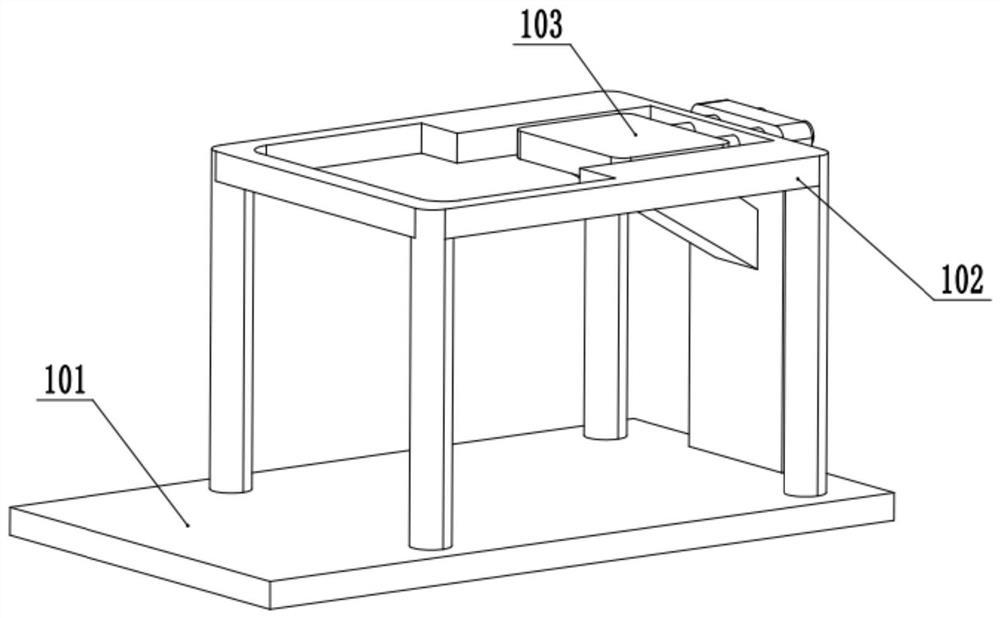
[0022] refer to figure 2 The shown base 1 includes a bottom plate 101 on which a horizontal frame 102 for installing other components is arranged, and a seat cushion 103 is slidably arranged on the horizontal frame 102, and the seat cushion 103 is automatically adjusted according to the physical condition of the patient.
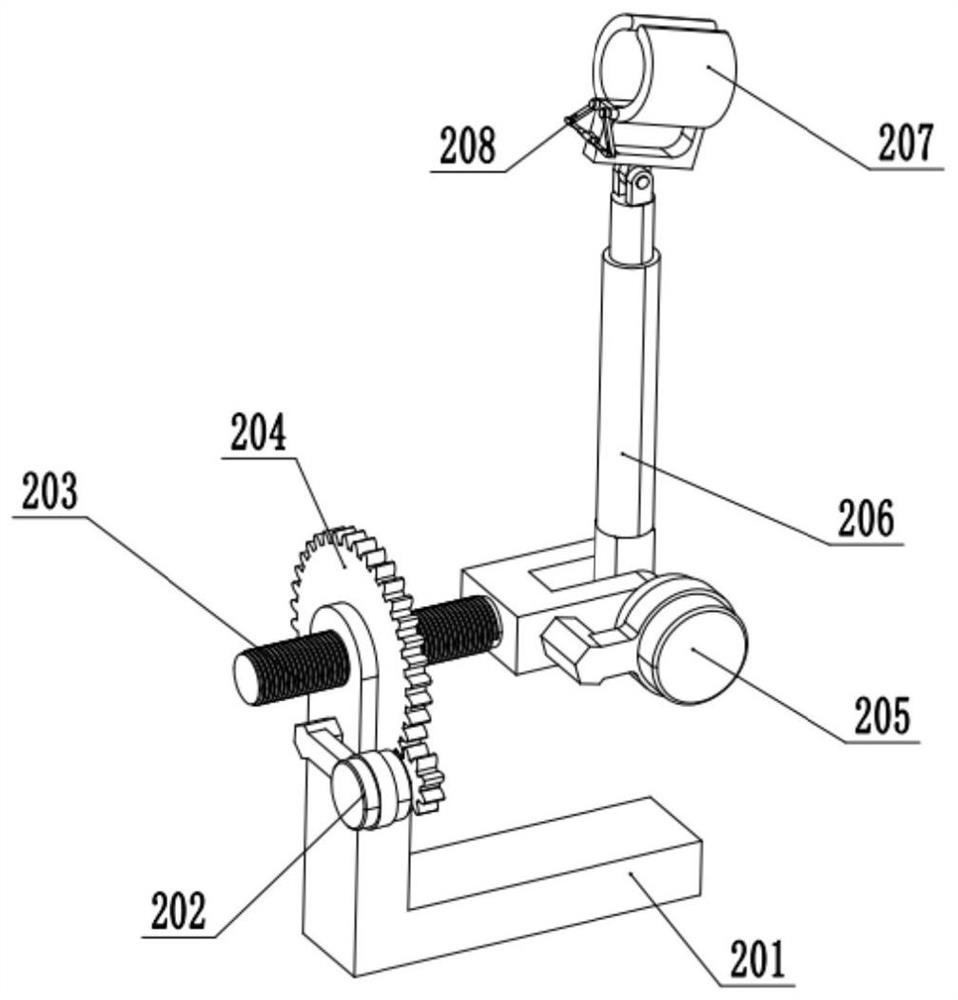
[0023] refer to image 3 The shown thigh clamping device 2 includes a base plate 201 installed on the base plate 101, the base plate 201 is provided with a transverse gear 202, and a transverse driven gear 204 is provided in mesh with the transverse gear 202, and the transv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com