Tension-controllable non-slip-ring type take-up and pay-off mechanism
A non-slip ring type, take-up and pay-off technology, applied in the field of non-slip ring type take-up and pay-off mechanism, can solve the problems of inability to meet the real-time dynamic follow-up power supply requirements of mobile robots, uncontrollable tension, etc., to improve power supply security and Reliability, low reliability, effect of improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
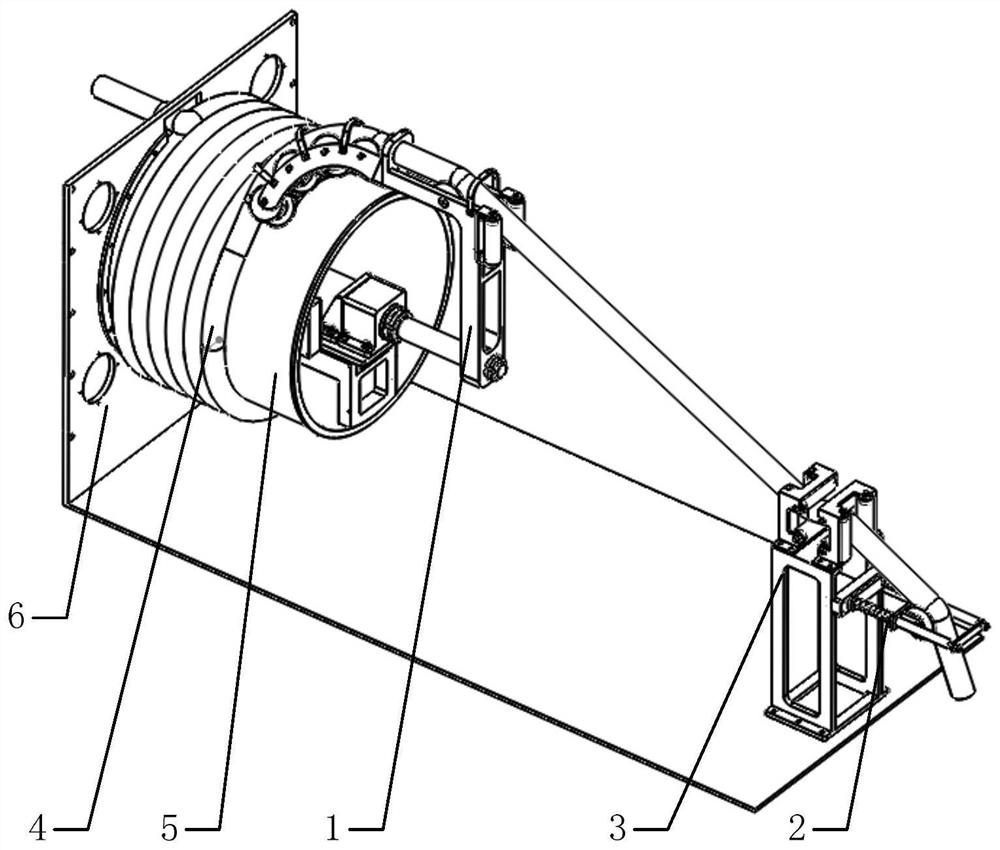
[0034] Such as figure 1 As shown, a tension controllable non-slip ring type take-up and pay-off mechanism provided by the present invention includes a winding arm 1, a cable positioning assembly 3, a cable 4, a bobbin 5 and a bracket 6, wherein the cable positioning The assembly 3 and the bobbin 5 are arranged on the bracket 6, the base of the bobbin arm 1 is set inside the bobbin 5, the operating mechanism for winding the cable is placed outside the bobbin 5, and one end of the cable 4 is wound on the bobbin On the bobbin 5, the other end passes through the winding arm 1 and the cable positioning assembly 3 in turn; the winding arm 1 has two degrees of freedom of winding and arranging the wires, which are used for retracting and arranging the cab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com