Vehicle-mounted multi-rotor unmanned aerial vehicle remote take-off and landing system
A multi-rotor UAV and unmanned aerial vehicle technology, applied in the direction of rotorcraft, control/regulation system, unmanned aircraft, etc., can solve the problems of reducing operation efficiency and safety, consuming large power, and low operation efficiency , to achieve the effect of improving operating efficiency and safety, accurate landing position, and reducing operating radius
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
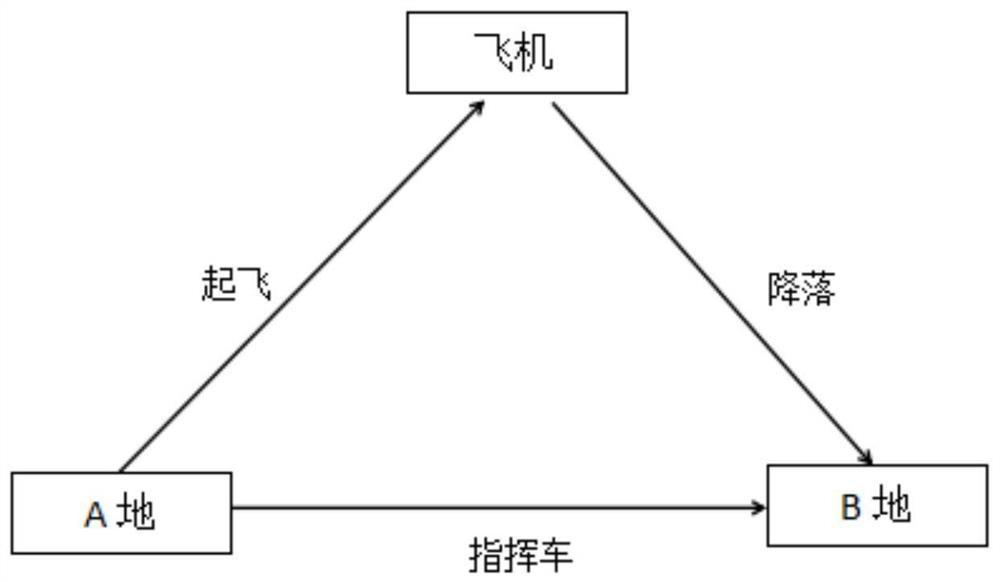
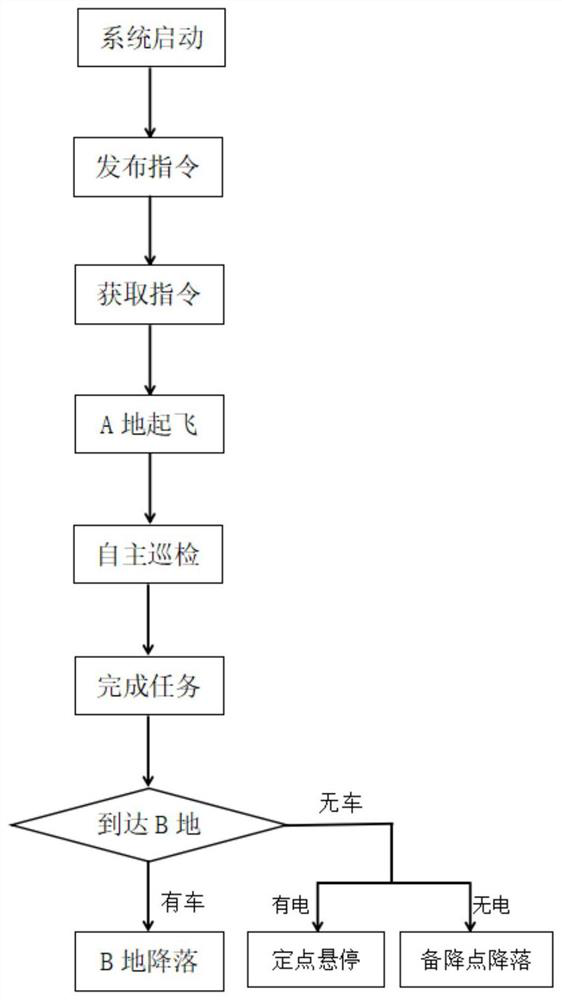
[0031] A vehicle-mounted multi-rotor unmanned aerial vehicle off-site take-off and landing system includes a multi-rotor unmanned aerial vehicle and a command vehicle. This system is suitable for blue-brand vehicles with a body less than 6m and a total mass of no more than 4500kg. It is also suitable for the take-off and landing or conversion of drones between one or more command vehicles; it can realize multi-rotor drones taking off from different places Landing, high-precision positioning and visual recognition enable the UAV to accurately land on the landing point or take-off and landing platform, so as to realize the take-off and landing at the take-off point, reduce the operating radius, and greatly improve the operating efficiency and safety.
[0032] In this embodiment,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com