Depth image texture and color recovery method and system
A deep image and color restoration technology, applied in the field of laser applications, can solve the problems of not being able to truly reflect image texture details and real colors, and achieve the effects of easy embedded system integration, simple optical path structure, and clear texture details
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
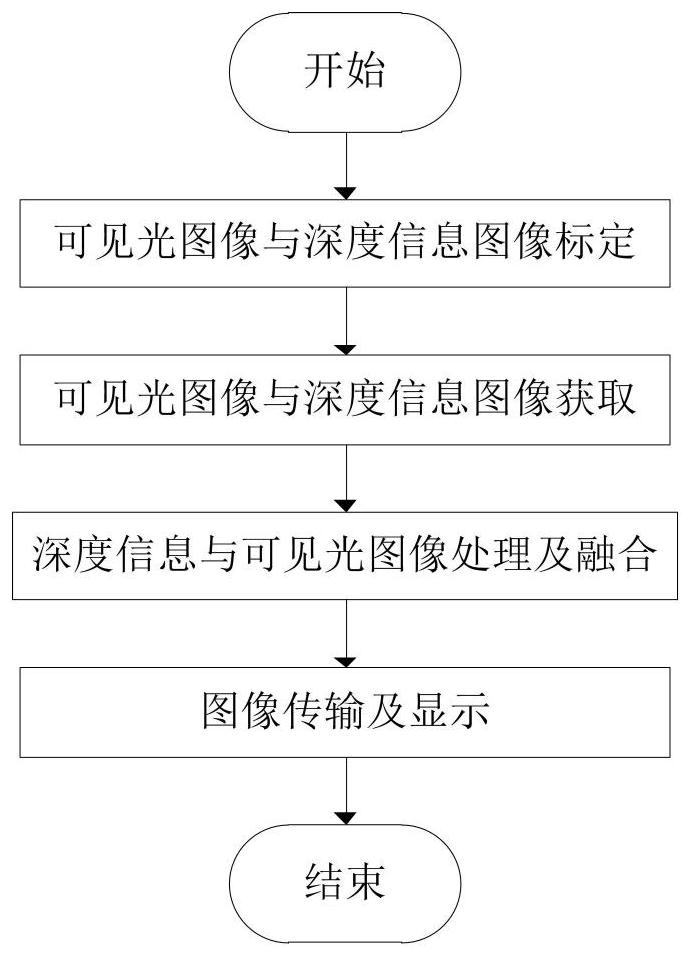
[0046] see figure 1 , a depth image texture and color restoration method, comprising the following steps:
[0047] S1: Image calibration, determine the relationship between the visible light image and the depth information image, and generate a mapping relationship table;
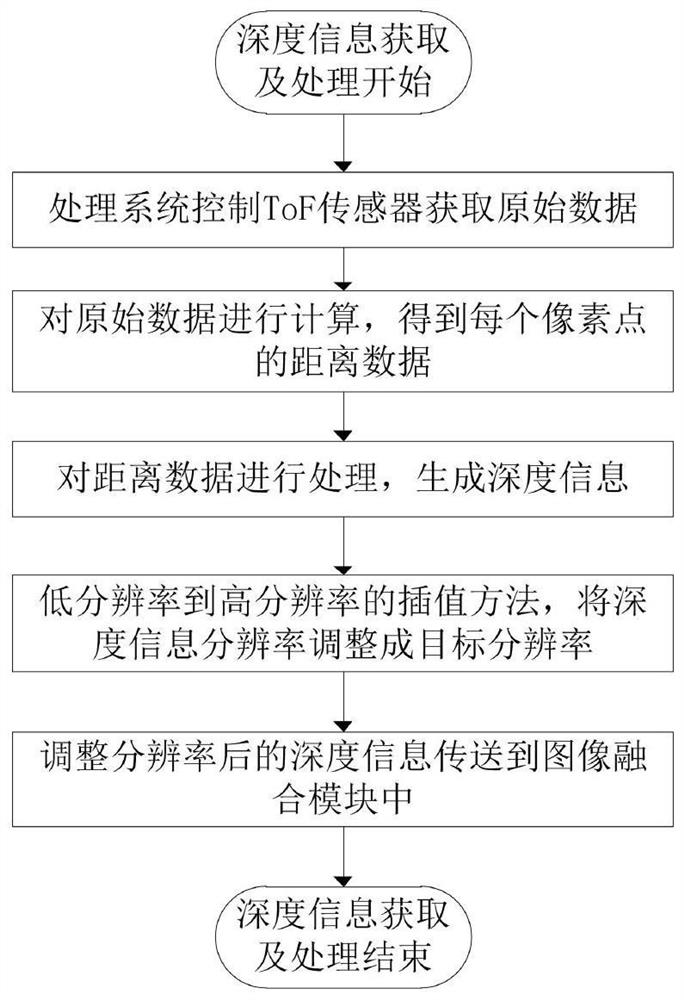
[0048] S2: Use the ToF (Time of Flight) sensor to obtain distance information, and process and generate depth information in the processing system;
[0049] S3: Use the visible light sensor to acquire image information, and process and generate visible light images in the processing system;
[0050] S4: In the image fusion module, perform image fusion according to the mapping relationship table, and generate a depth information map with texture and real color;
[0051] S5: transmitting or displaying the depth information, the visible light image and the fused depth information image.
Embodiment 2
[0053] see Figures 1 to 5 ,
[0054] A depth image texture and color restoration method, comprising the following steps:
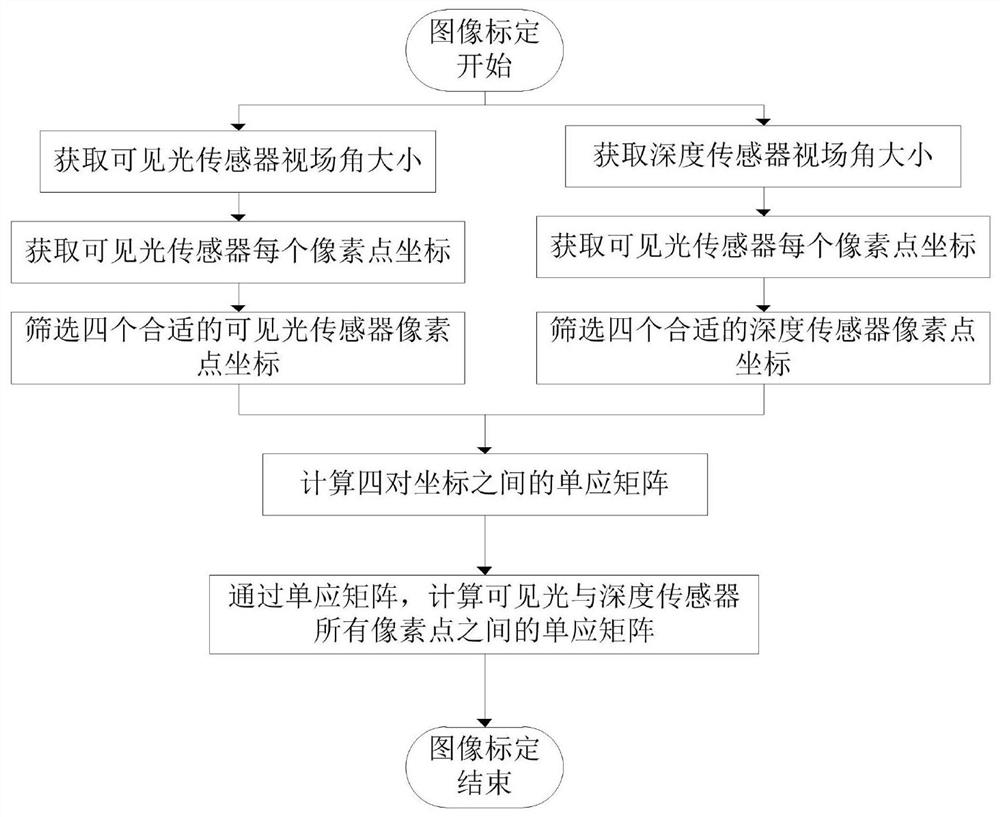
[0055] S1: Image calibration, determine the relationship between the visible light image and the depth information image, and generate a mapping relationship table;
[0056] S1-1: Using the parallel optical axis optical structure, determine the field angle of visible light and depth sensor;
[0057] S1-2: Acquire the coordinates of each pixel in the field of view of the visible light and depth sensors;
[0058] S1-3: Screen four suitable pixel coordinates of the visible light sensor and four suitable pixel coordinates of the depth sensor, and calculate the homography matrix between the four pairs of coordinates;
[0059] S1-4: Through the homography matrix, calculate the homography matrix between all visible light and depth sensor pixels.
[0060] S2: Use the ToF (Time of Flight) sensor to obtain distance information, and process and generate depth in...
Embodiment 3
[0074] refer to Figure 6 Figure 7 , a depth image texture and color restoration system, used to realize the weight depth image texture and color restoration method, the system includes an optical system and a hardware system, the optical system includes a TOF sensor and a visible light sensor; the hardware system Including depth sensor, visible light sensor, CPU / DSP / FPGA processing system, external interface.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com