No-mark surgery registration method used for optical surgery navigation system
A surgical navigation and markerless technology, applied in the field of optical surgical navigation, can solve the problems of labor and time-consuming, affecting the accuracy of surgical registration, and surgical trauma, and achieve the effect of simple configuration steps.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
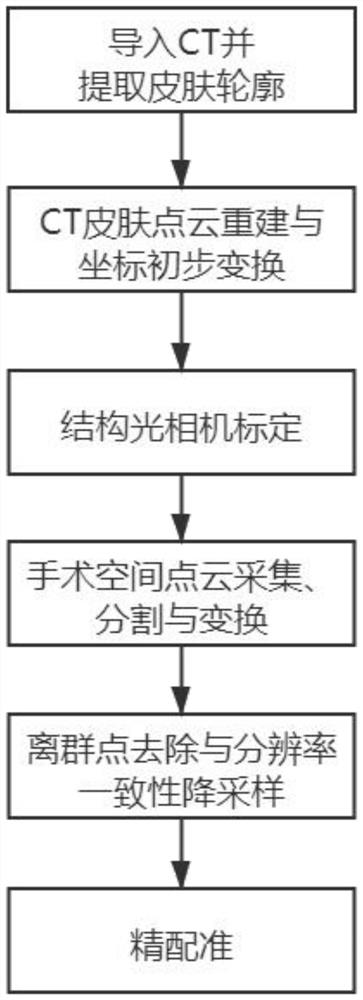
[0030] refer to figure 1 , a markerless surgical registration method for an optical surgical navigation system, comprising the steps of:
[0031] S1: Import the CT sequence of the lesion, process the CT image and extract the upper surface skin contour;
[0032] S2: Reconstruct the two-dimensional skin contour into a three-dimensional point set H, and perform preliminary coordinate transformation on the CT coordinate system of the point set H;
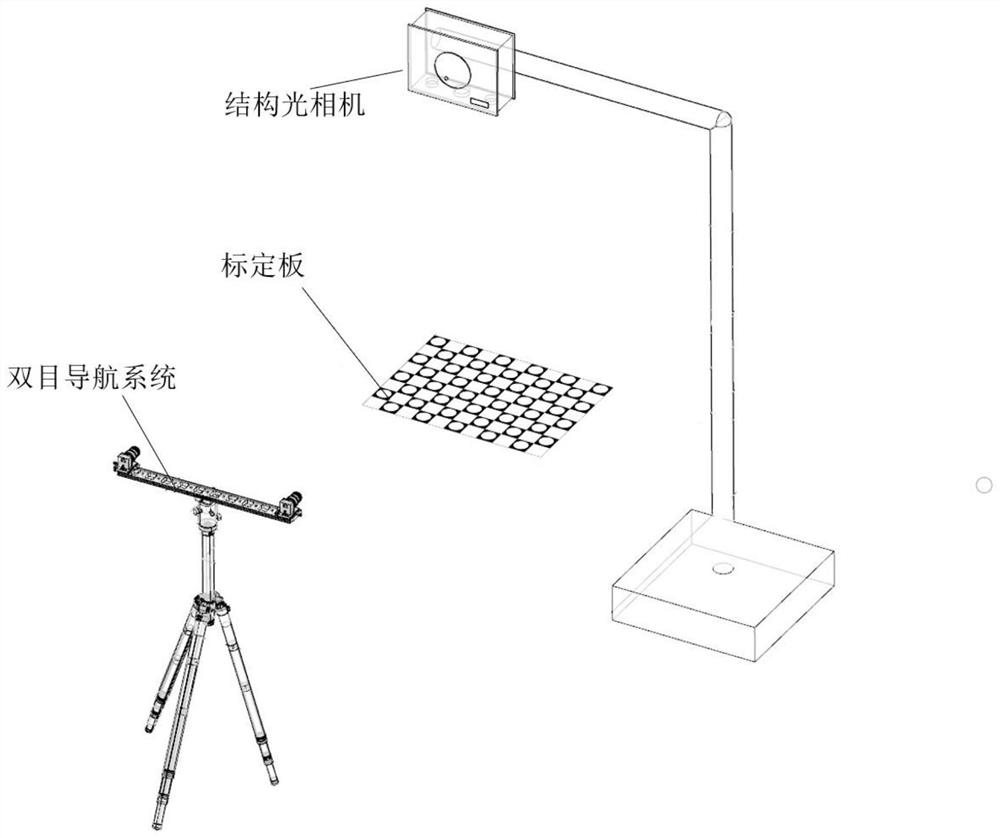
[0033] S3: Calibrate the structured light camera to the surgical space coordinate system, and obtain the conversion relationship between the structured light camera coordinate system and the surgical space coordinate system;
[0034] S4: The structured light camera collects the depth data from the lesion to the camera, so as to obtain the three-dimensional coordinate point set of the lesion, segment the skin point set V from the three-dimensional point set, and divide the point set V according to the coordinate transformation relations...
Embodiment 2
[0039] In this embodiment, in the step S1, the CT image is sequentially subjected to windowing processing, binarization processing and contour extraction to obtain a two-dimensional skin contour, and then the upper quarter of the contour is intercepted as the upper surface skin contour.
[0040] In this embodiment, in the step S2, the preliminary coordinate transformation is: carry out coordinate transformation on the original point set H, and redesignate the origin and direction of the CT image space coordinate system, so that the CT image space coordinate system and the operation space coordinate system in roughly the same direction.
[0041] In this embodiment, in the step S3, the calibration process uses a special calibration board, which can simultaneously calibrate the structured light camera and the binocular navigation system, so as to realize the calibration of the structured light camera to the surgical space coordinate system.
[0042] In this embodiment, in the ste...
Embodiment 3
[0045] In this example, see Figure 1 to Figure 6 , a markerless surgical registration method for an optical surgical navigation system, specifically comprising the following steps:
[0046] S1: Import CT and extract skin contour. like figure 2 As shown, the CT sequence of the lesion was imported, and the CT image was processed by windowing, binarization and contour extraction to obtain a two-dimensional skin contour, and then the upper quarter of the contour was intercepted as the upper surface skin contour.
[0047] S2: CT skin point cloud reconstruction and preliminary transformation of coordinates. like figure 2 As shown, the two-dimensional skin contour extracted in step S1 is attached with the z-direction coordinate value to reconstruct the three-dimensional point set H, the coordinate transformation is performed on the original point set H, and the origin and direction of the CT image space coordinate system are re-specified, so that the CT image The spatial coord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com