


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Unmanned aerial vehicle task planning method based on graphic label
A graphic label and drone technology, applied in the field of drones, can solve problems such as error-prone, unfavorable for later maintenance, and inability to intuitively identify, so as to improve the accuracy of planning, flexible task design and planning process, and improve planning efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0049] Refer to attached Figure 5-7 , a kind of unmanned aerial vehicle mission planning method based on graphic label that the present invention proposes, concrete implementation steps are as follows:
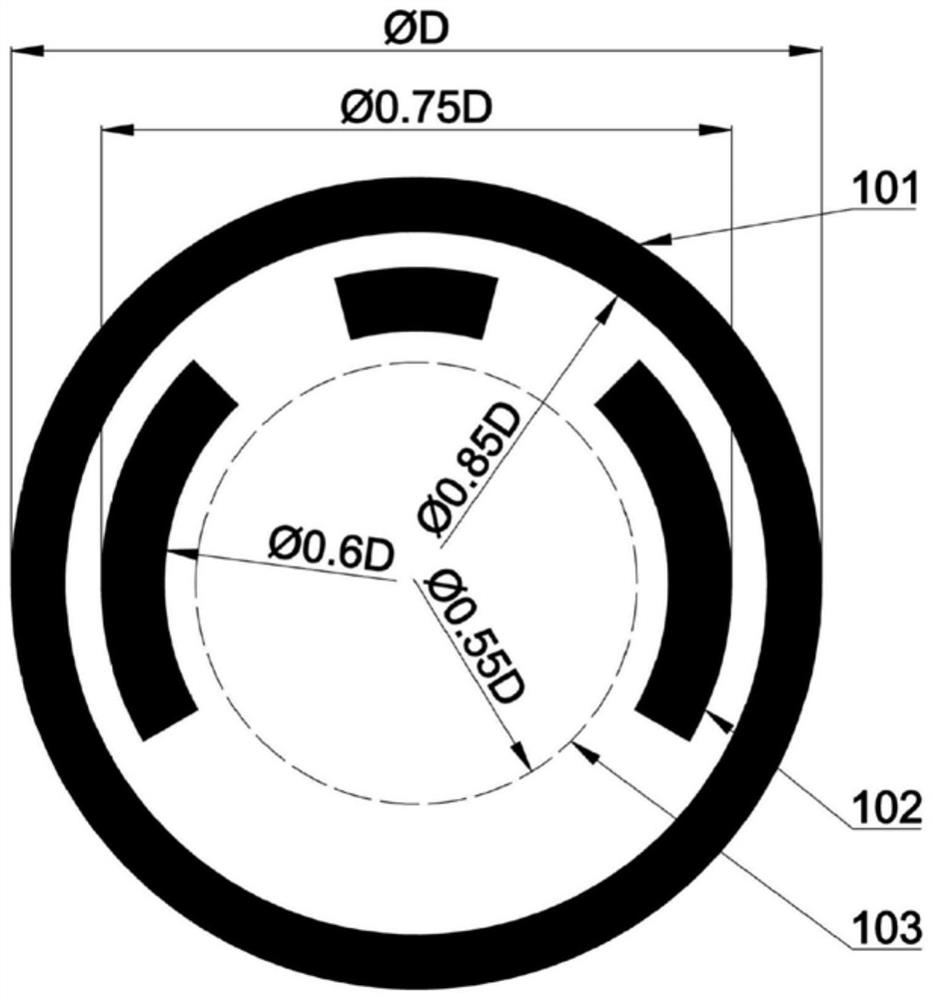
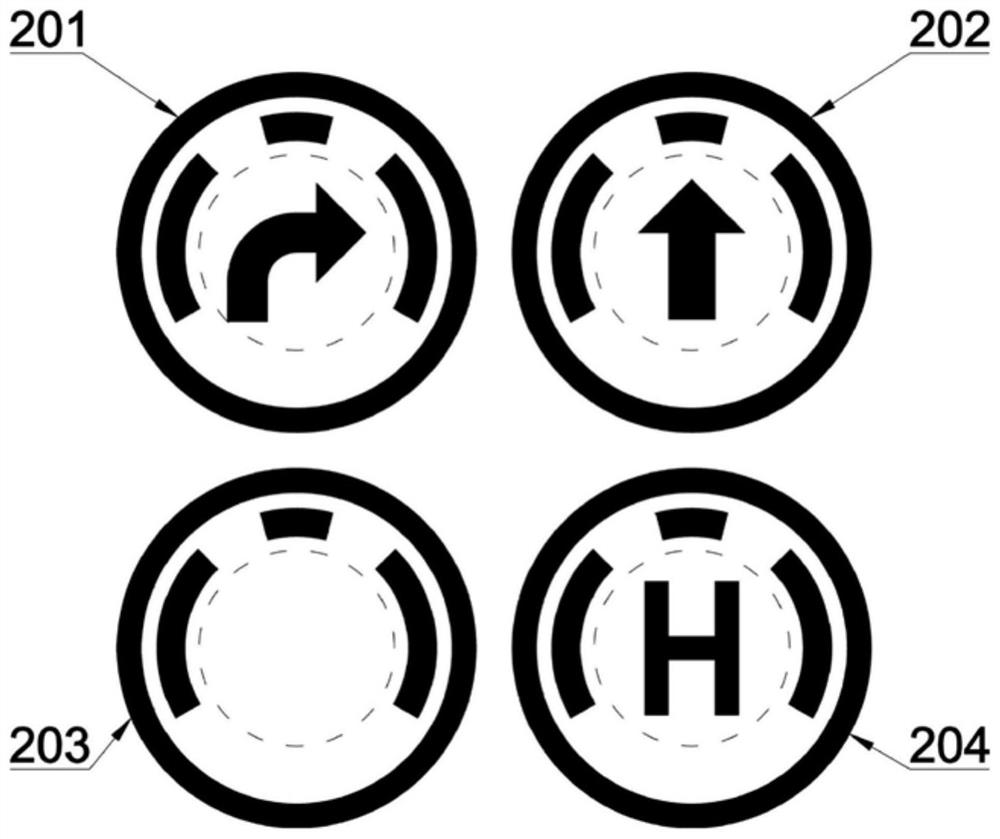
[0050] Step 1. Refer to attached Figure 1-3 , to construct a label consisting of three elements: a frame, a direction indicator and an icon:
[0051] (1.1) Establish a circular boundary with a center of O and a diameter of D, that is, an outer frame, such as figure 1 Shown in the mark 101; the diameter D is preset according to the flying height of the drone and the resolution of the camera;
[0052] (1.2) Inside the outer frame, with O as the center, D 2 Take three arcs on the ring with diameter, D 2 figure 1 Shown in the mark 102; it is used to control the direction of UAV head turning;
[0053] (1.3) With O as the center, D 3 Draw a circular dashed circle box inside the direction indicator for the diameter, as in figure 1 Shown in the subscript 103; where D 3 2 , add...
Embodiment 2
[0090] The implementation steps of this embodiment are the same as in Embodiment 1, and only steps 5 and 6 are further described:
[0091] Follow certain rules for label numbering, including:
[0092]a. The label block number is the first-level number, and its internal label number is the second-level number;
[0093] b. The label block number starts from 0, and the order is numbered according to the order in which the drone first arrives at the label block;
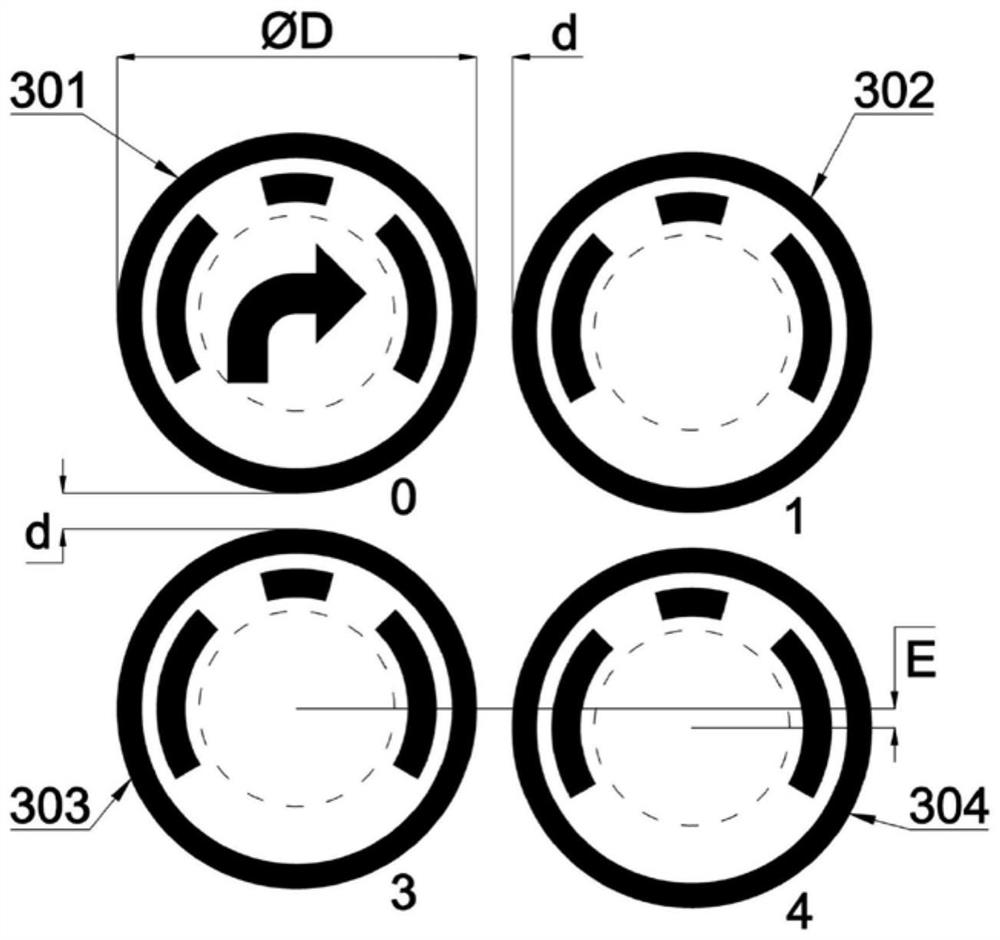
[0094] c. Same as the previous step b, the internal label number starts from 0 and increases successively, and its numbering sequence is the same as that of the UAV reading sequence. refer to image 3 , assuming that the label block number is 0, that is, the location of the label block is the take-off area of the drone, then the label numbers in the label block are as follows: the starting label 301 is numbered 0.0, the label 302 is numbered 0.1, and the label 303 is numbered is 0.2, and the tag 304 number is 0.3. ...
Embodiment 3
[0097] refer to Figure 6 and 7 , the implementation steps of this embodiment are the same as those of Embodiment 1, and only steps 8 and 9 are further described:
[0098] After the drone is started, it starts to run automatically. First, it starts to search for the label block, including searching for the label and locating to the label position and searching for the start label in the label block where the label is located.
[0099] The method and process for searching tags include the following:
[0100] S1.1. The recognition of the outer frame uses the Canny edge detection algorithm and the Hough circle transformation method to detect, obtain the center coordinates and diameter of the circle detected in the field of view, and remove the inner ring of the outer frame by the non-maximum value suppression method, Get accurate data.
[0101] S1.2. The detection of the direction indicator is based on the detection of the outer frame, after obtaining the coordinates of the ce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com