A frog-like amphibious robot based on hybrid mechanism
A hybrid mechanism and amphibious technology, applied in the field of bionic robots, can solve the problems of insufficient motion accuracy and motion efficiency, low walking efficiency, and high mechanism complexity, so as to facilitate robot control and waterproof design, improve walking efficiency, The effect of high exercise efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
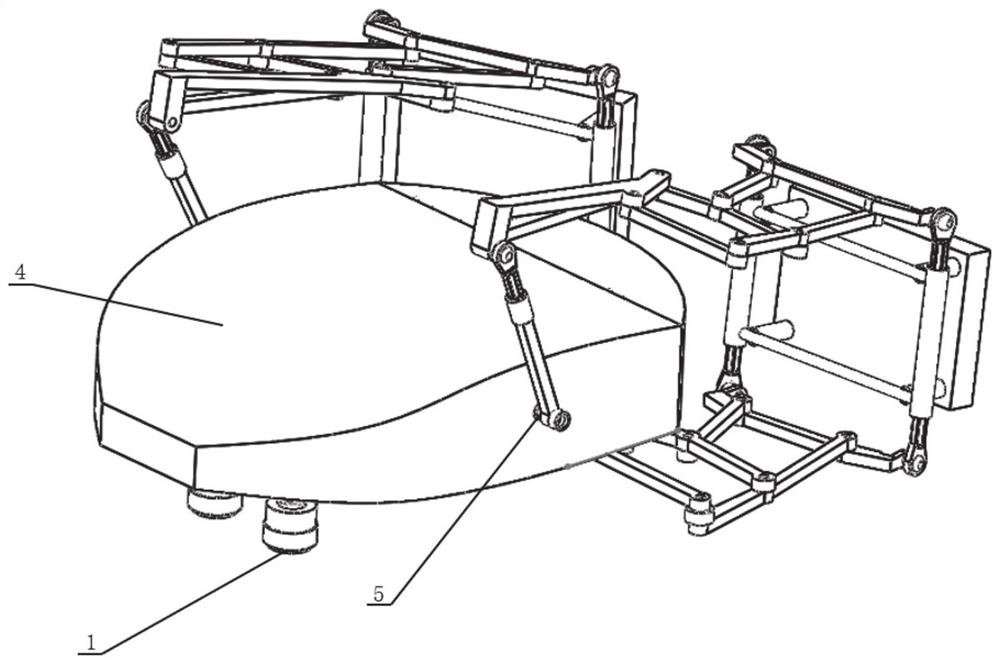
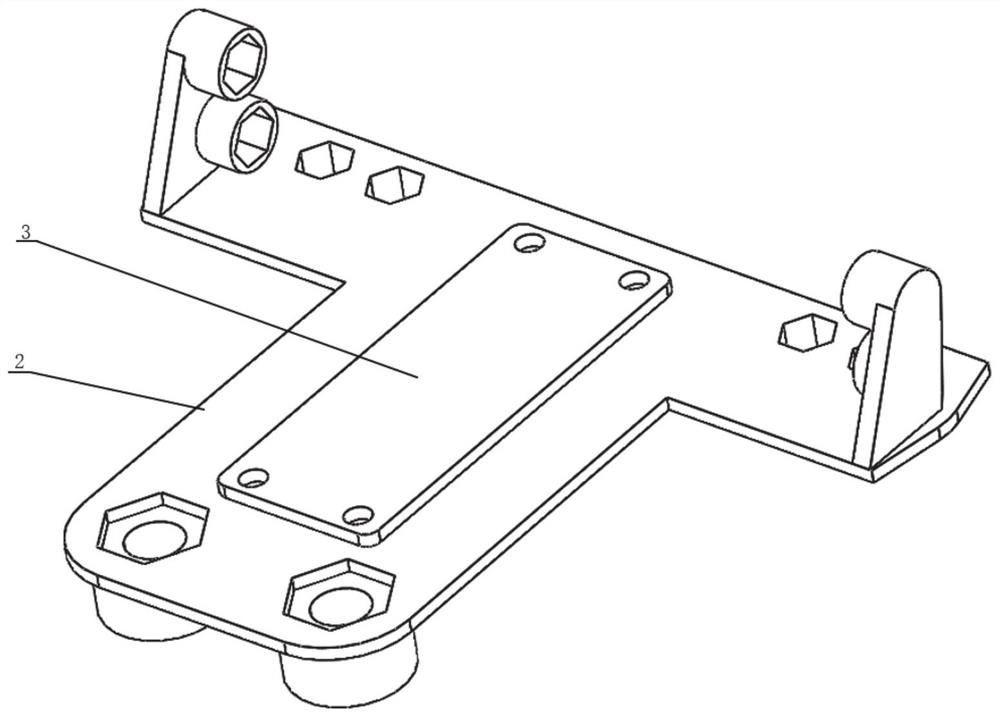
[0034] Such as figure 1 , figure 2 As shown, the robot shell assembly (III) is composed of universal wheels (1), drive mechanism connectors (2), installation base (3) and housing (4), and the universal wheels (1) are located at the front end of the robot. Auxiliary motion function, the drive mechanism connector (2) is located inside the robot housing (4), used to carry the motor drive assembly (II), this part consists of the circuit control board (6), the front servo motor (13) and the rear Servo motor (17) is formed, and the motor shaft of servo motor (17) is towards the side of robot, and the motor shaft of servo motor (13) is towards robot below; Mechanical drive assembly (1) is divided into two groups of mechanical drive mechanisms, placed symmetrically The left and right sides of the robot are driven by the servo motors on the left an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com