Dynamic positioning information fusion method for underwater unmanned robot cluster
A technology of dynamic positioning and fusion methods, which is applied in the directions of instruments, navigation, surveying and navigation, etc., can solve the problems of unsuitable AUV cluster formation, narrow bandwidth of underwater acoustic communication channel, and low data transmission rate, so as to avoid the problem of asynchronous filtering, The effect of eliminating gross observation errors and ensuring timeliness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
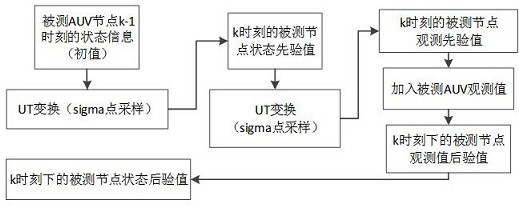
[0074] Example: such as Figure 1 to Figure 4 As shown, a dynamic positioning information fusion method for underwater unmanned robot swarms, the method includes the following steps:
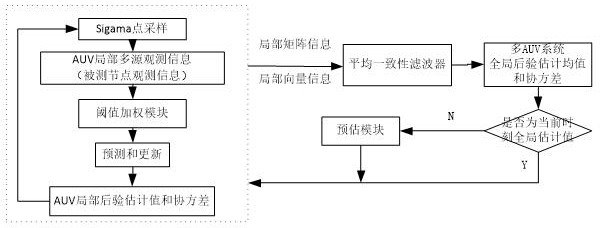
[0075] Step 1: Build the state space model of the multi-AUV collaborative positioning system, comprehensively consider the dynamic characteristics of the platform, determine the input parameters, add Gaussian noise, and establish the motion equation. Build a communication network model based on the average network undirected graph, describe the sparsity through the effective communication connection edge set between any nodes, and describe the sparse network by monitoring the change of the relative probability value in the average adjacency matrix and the average Laplacian matrix Random dynamic changes, describing the convergence of the consensus method from the perspective of mean square convergence.
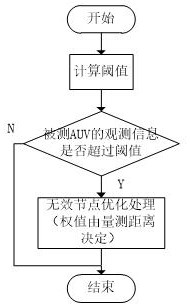
[0076] Step 2: Use threshold weighting to eliminate gross errors in local information: the b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com