Multi-AUV collaborative navigation method based on reinforcement learning
A collaborative navigation and reinforcement learning technology, applied in navigation, surveying and mapping and navigation, navigation computing tools, etc., can solve problems such as difficult trajectories and difficult to find solutions, and achieve the effect of reducing positioning errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
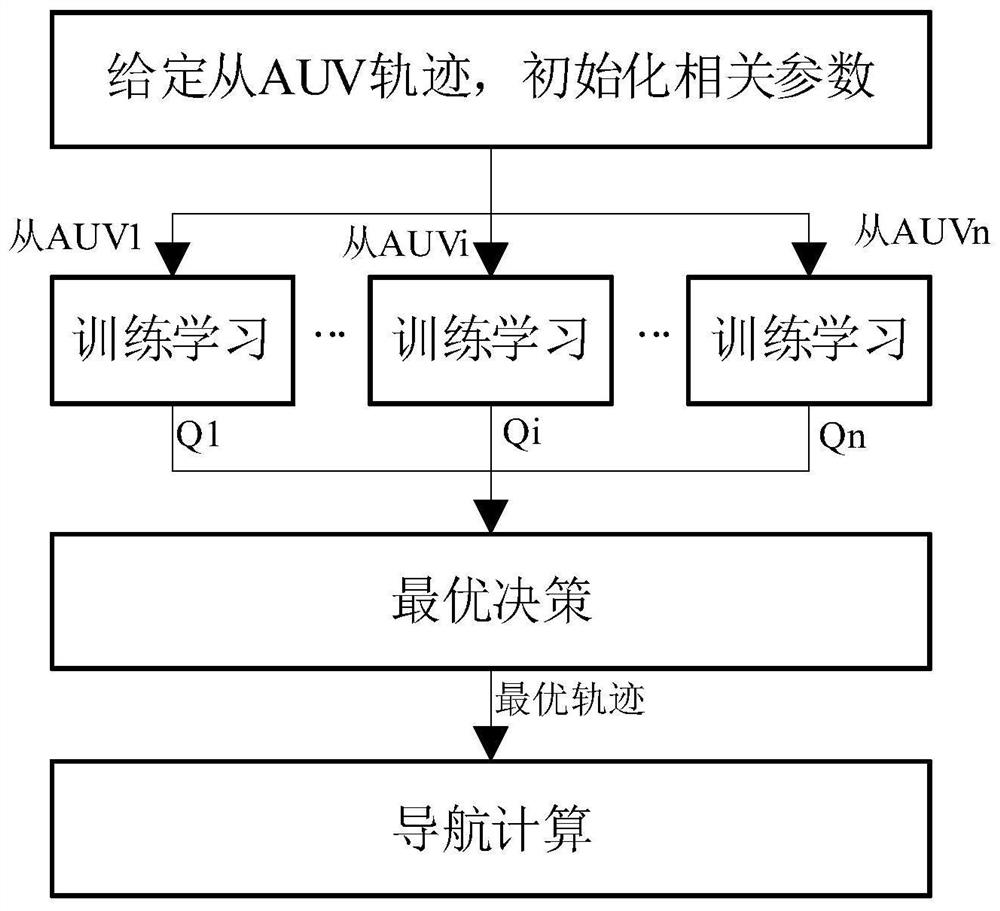
[0094] This embodiment is a single-master-three-slave cooperative navigation system. The three slave AUVs start from points (-150,0), (0,0) and (150,0) to move in a straight line at a uniform speed, and the initial heading angles are π / 2. The sailing speed is 1.5m / s. The simulation time is 4000s, and the navigation speed of the main AUV is 2.5m / s.
[0095] The state quantities in the selected state set are relative azimuth and relative distance, and then the state quantities are discretized to form a state set, as shown in the following table:
[0096] Table 1 Discretization parameters of state quantity
[0097]
[0098] The action set selects the heading angular velocity of the main AUV, and sets the maximum heading angular velocity of the main AUV to 0.08rad / s. The action set is selected as follows:
[0099] A=[-0.08,-0.05,-0.03,0.00,-0.03,-0.05,0.08]
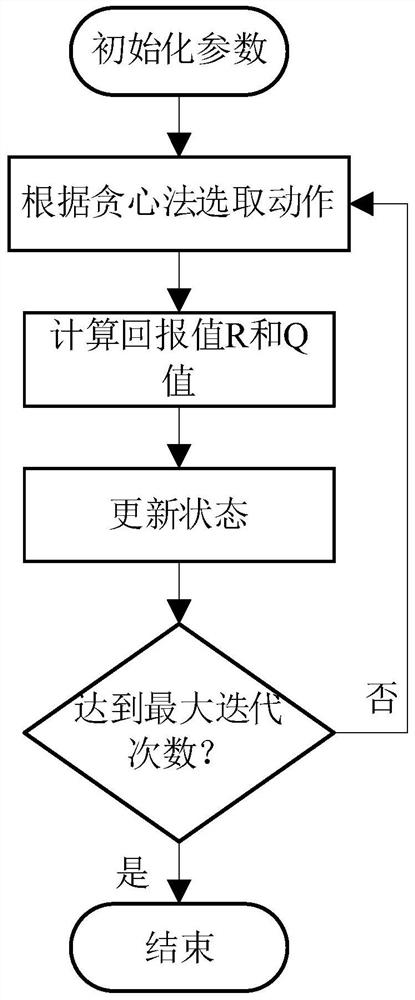
[0100] The maximum number of learning times is set to 1000, and the relevant parameters of the training and learning p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com