Kiwi fruit picking device based on Delta mechanical arm
A technology of robotic arm and kiwi fruit, which is applied in the direction of picking machines, manipulators, program-controlled manipulators, etc., can solve the problems of poor performance reliability, high damage rate, and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
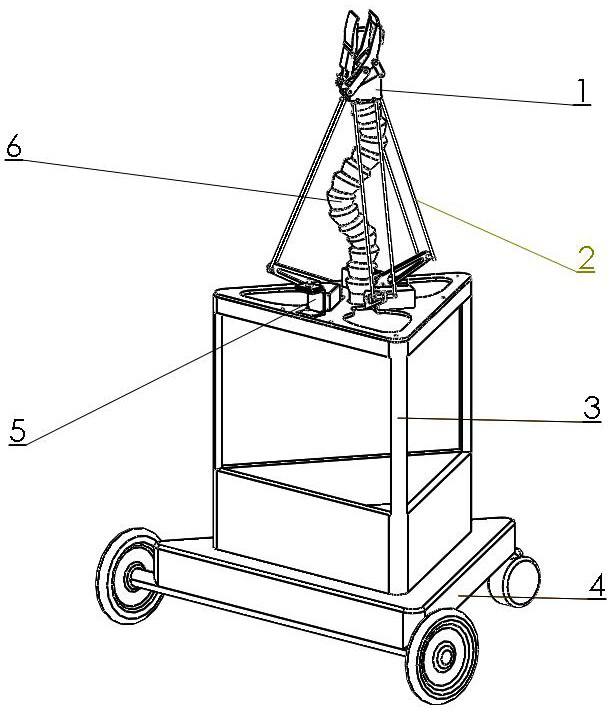
[0022] Attached below Figure 1~7 The present invention is described further:
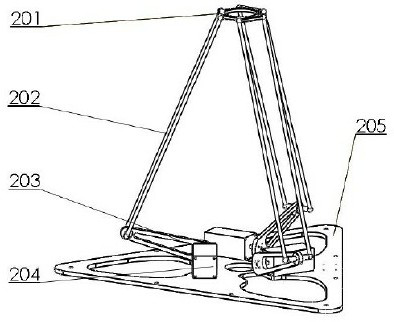
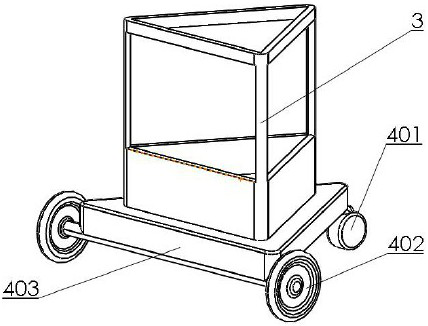
[0023] A kiwifruit picking device based on a Delta robot arm, comprising six parts: a picking hand 1, a Delta robot arm 2, a vehicle frame 3, a mobile chassis 4, a recognition camera 5, and a flexible collection pipe 6. Picking hand 1 adopts mechanical clamping picking claws, or adopts other types of picking claws according to actual needs. Picking hand 1 needs to be able to hold and pick fruits, and make the fruits fall into the flexible collection tube 6; the Delta mechanical arm The specific structure of 2 includes a moving platform 201, a driven arm 202, a driving arm 203, a stepping motor 204, a static platform 205, a joint connection shaft 206, a motor shaft disc 207, and a motor seat 208; the main body of the vehicle frame 3 is a profile frame , which is loaded with circuit components such as a controller, a driver, a power supply box, and a fruit collection basket; the mobile chassis 4 ado...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com