Map updating method and system based on improved Gmaping-SLAM
A technology for map update and operation improvement, which is applied to road network navigators and other directions, and can solve problems such as increasing computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
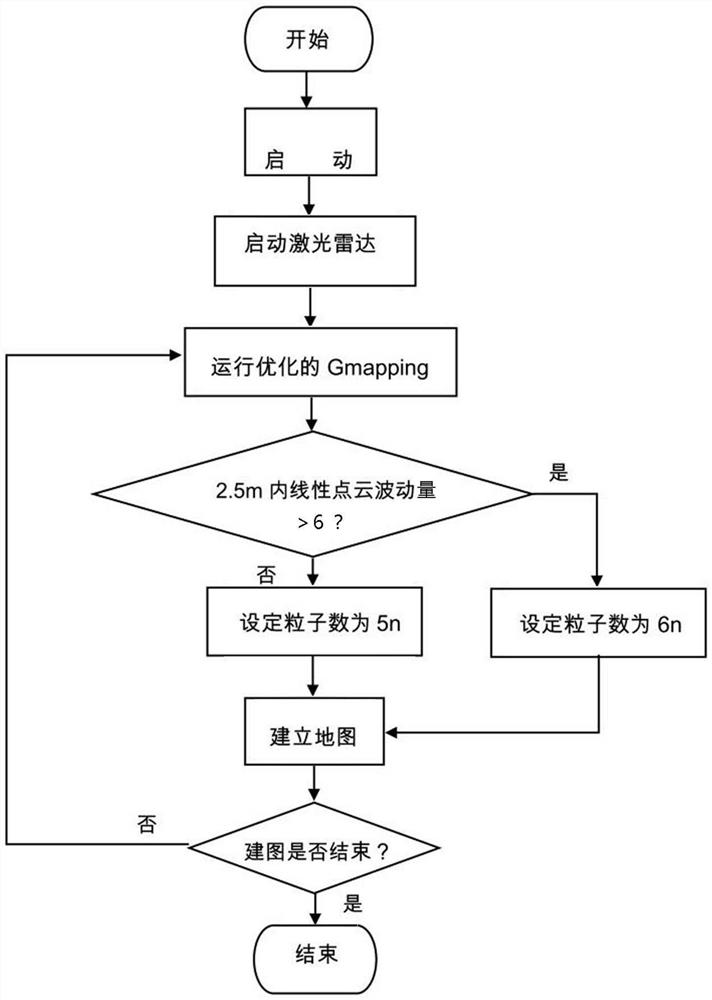
[0029] An improved Gmapping-SLAM map update method, comprising: collecting environmental information around the robot, positioning the robot and its surrounding objects; using the collected environmental information as input, running an improved Gmapping algorithm, including: according to the environment The amount of point cloud fluctuation in the information adjusts the number of particles required for sampling; determine the linear relationship between the amount of point cloud fluctuation and the number of particles, so that the number of particles changes in a linear manner with the change of the complexity of the environment, and the map is updated.
[0030] Such as figure 1 As shown, the improved Gmapping-SLAM map update method described in this embodiment mainly includes the following steps:
[0031] Step S1, start the ROS system (robot operating system) to provide a development platform for the SLAM (real-time positioning and map construction) of the robot;
[0032] ...
Embodiment 2
[0062] Based on the improved Gmapping-SLAM map update method described in Embodiment 1, this embodiment provides an improved Gmapping-SLAM map update system, including:
[0063] The first module is used to collect environmental information around the robot and locate the robot and its surrounding objects;
[0064] The second module is used to run the improved Gmapping algorithm with the collected environmental information as input, including: adjusting the number of particles required for sampling according to the point cloud fluctuation in the environmental information; determining the linearity between the point cloud fluctuation and the number of particles Relationship, so that the number of particles changes in a linear manner with the change of the complexity of the environment, and the map is updated.
[0065] Those skilled in the art should understand that the embodiments of the present application may be provided as methods, systems, or computer program products. Acco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com