Map construction method and device based on SLAM
A map construction and map technology, applied in image enhancement, image analysis, image data processing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
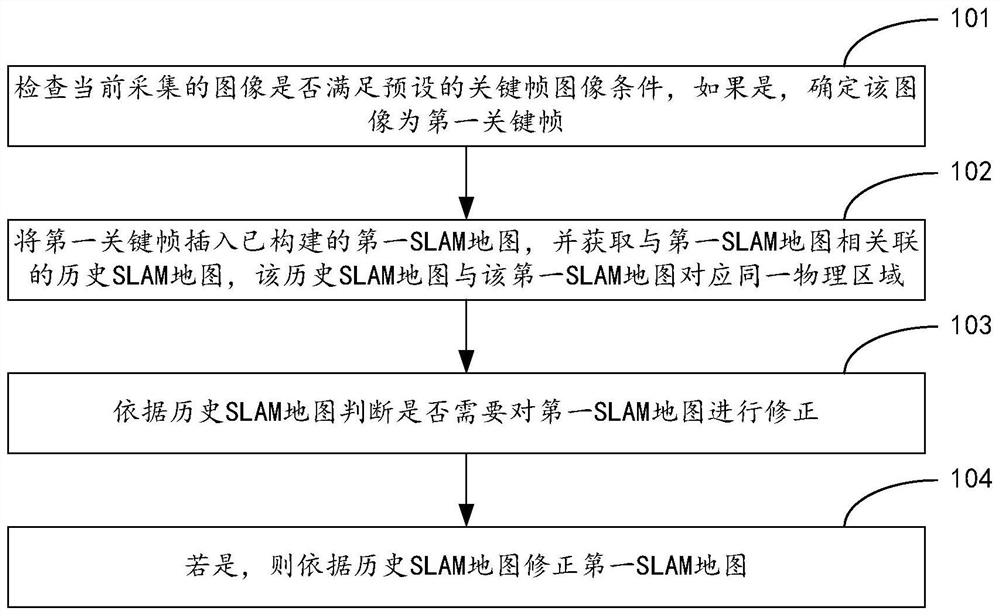
[0063] See figure 1 , a flow chart of an embodiment of a SLAM-based map construction method provided in an exemplary embodiment of the present application, the method may include the following steps:
[0064] Step 101: Check whether the currently collected image satisfies the preset key frame image condition, and if so, determine that the image is the first key frame.
[0065] In the embodiment of the present application, an intelligent robot is used as an example to execute the method provided in the present application. The intelligent robot is equipped with a camera module, which can collect images of the current physical area through the camera module.
[0066] Every time the intelligent robot collects an image, it can detect whether the image meets the preset key frame image condition, and if so, the image can be determined as the first key frame. As for the image condition of the key frame, reference may be made to the above description, which will not be repeated here....
Embodiment 5
[0147] See Image 6 , an embodiment flowchart of the process of deleting redundant key frames in the first SLAM map provided by an exemplary embodiment of the present application may include the following steps:
[0148] Step 601: Group all key frames in the first SLAM map to obtain at least two key frame groups.
[0149] In the embodiment of the present application, firstly, a keyframe tree may be generated by using all keyframes in the first SLAM map according to the maximum spanning tree algorithm. For example, if Figure 7 Shown is an example of a keyframe tree, Figure 7 The keyframe tree illustrated in includes 7 nodes from K1 to K7, and each node represents a keyframe in the first SLAM map.
[0150] Afterwards, the root node of the key frame tree, such as node K1, is used as the current node, and for each other node in the key frame tree except the current node, the position of the current node and the other nodes is calculated. If the first value is smaller than th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com