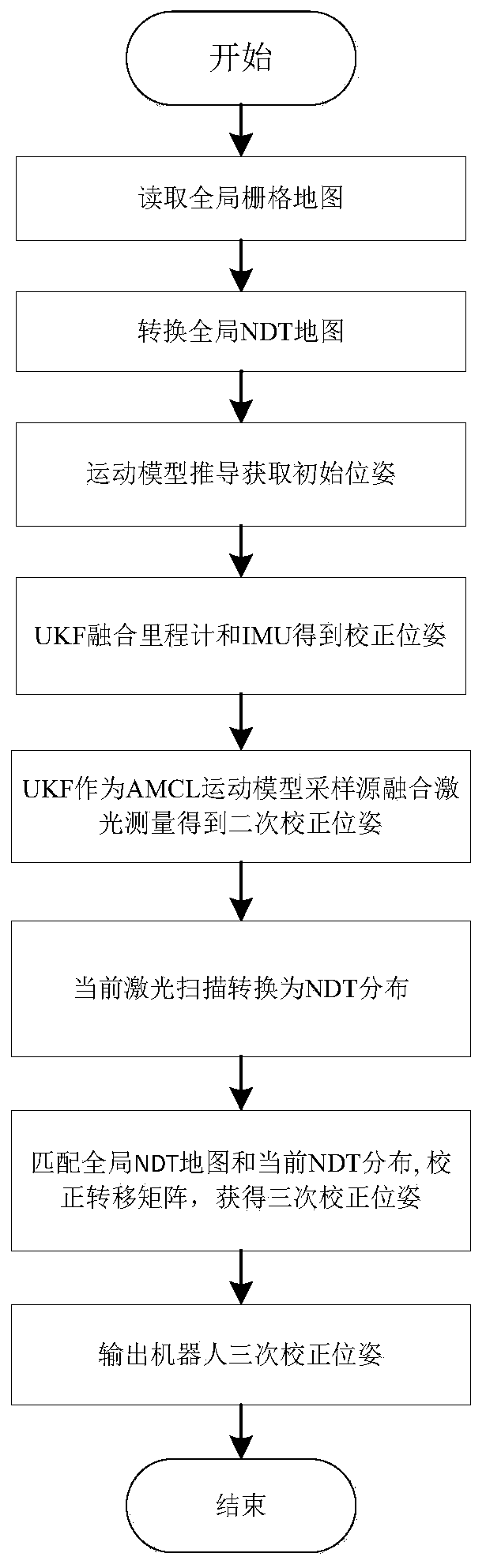
Mobile robot fast and accurate localization algorithm based on multiple attitude correction
A mobile robot, precise positioning technology, applied in the field of robotics and computer graphics, can solve the problems of high positioning time, low positioning accuracy, error accumulation, etc., to avoid high time consumption and improve positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
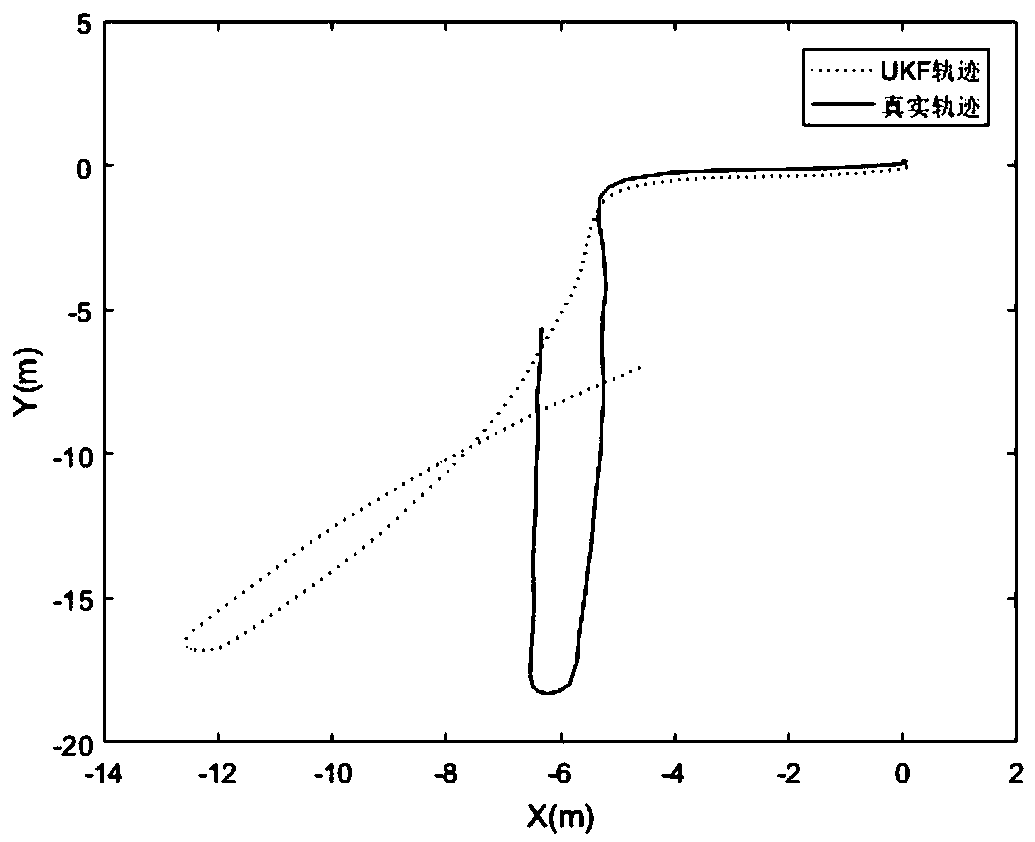
[0037] This embodiment provides a fast and accurate positioning algorithm for a mobile robot based on multiple pose corrections. The embodiment of the present invention uses a HUSKY A200 robot for algorithm verification. The robot is equipped with an industrial computer of the ROS system, a motion control module, an information collection module, Inertial measurement unit, odometer and other components, externally equipped with LMS151 two-dimensional laser radar, visual camera, infrared thermal imaging camera and other components. The grid map used in the embodiment of the present invention is built by the robot through gmaping, an open source SLAM framework. The algorithm is tested in two parts: positioning accuracy and positioning time. In the positioning accuracy test part, the robot records data every time it moves 80 cm or rotates 20 degrees. A to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com