Driving and driven hand rehabilitation training robot
A rehabilitation training and robotics technology, applied in passive exercise equipment, sports accessories, gymnastics equipment and other directions, can solve the problems of difficult rehabilitation sports training, single training mode and high price.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
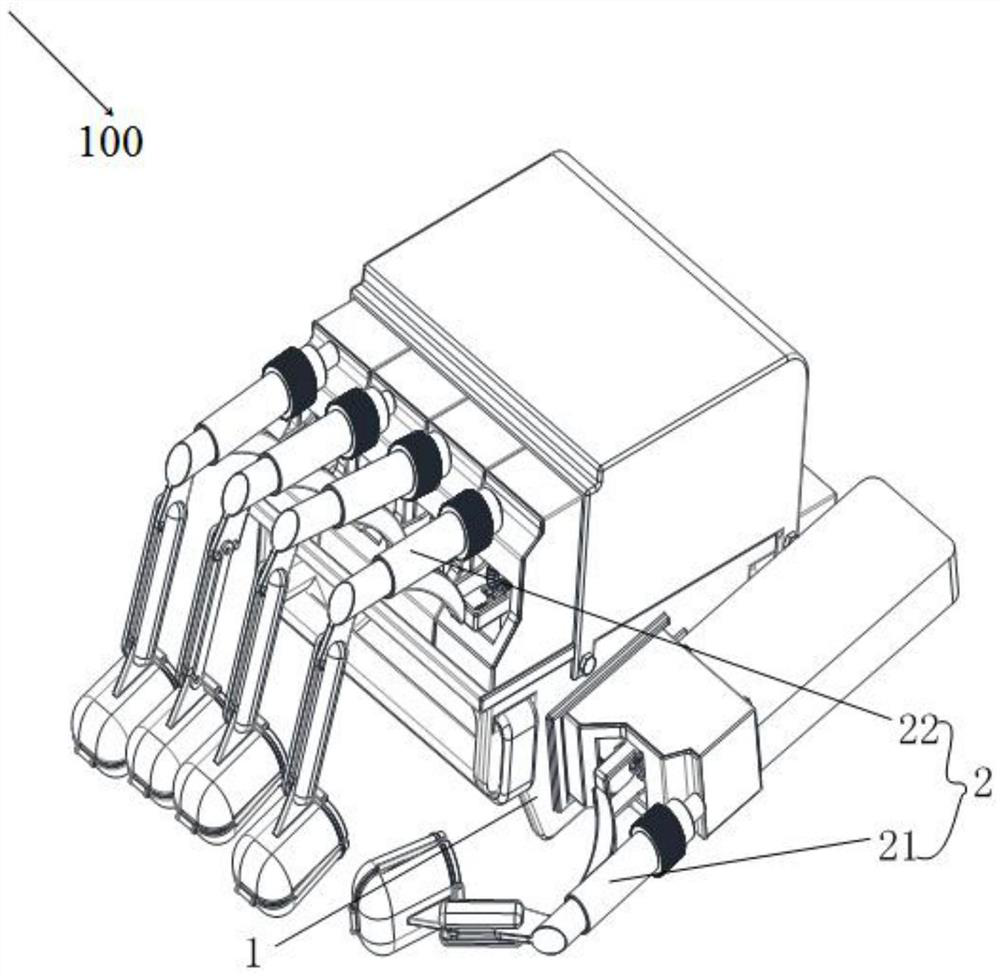
[0029] figure 1 It is a schematic diagram of the overall structure of the active and passive hand rehabilitation training robot in the embodiment of the present invention.
[0030] Such as figure 1 As shown, an active and passive hand rehabilitation training robot 100 in this embodiment includes a support frame and a finger driving module.
[0031] The opening of the bracket frame 1 is downward, and the bracket frame 1 has two palm fixing straps 233 for fixing the palm, which are installed on the front and rear ends of the bracket frame 1 respectively.
[0032] The upper surface of the bracket frame 1 has a four-finger installation slot 232 for installing the four-finger drive module 22, the four-finger drive module 22 is installed close to the four-finger installation slot 232, and the bottom surface of the installation bracket 201 of the four-finger drive module 22 It is fixedly connected with the upper surface of the support frame 1 by bolts.
[0033] The five finger dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com