Crash board assembly and self-moving robot
A board assembly and robot technology, applied in the field of intelligent robots, can solve the problems of difficulty in achieving balance, obstacles cannot be effectively protected, and dangerous accidents occur in cleaning robots, so as to reduce risks, use high efficiency, and control simple problems. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
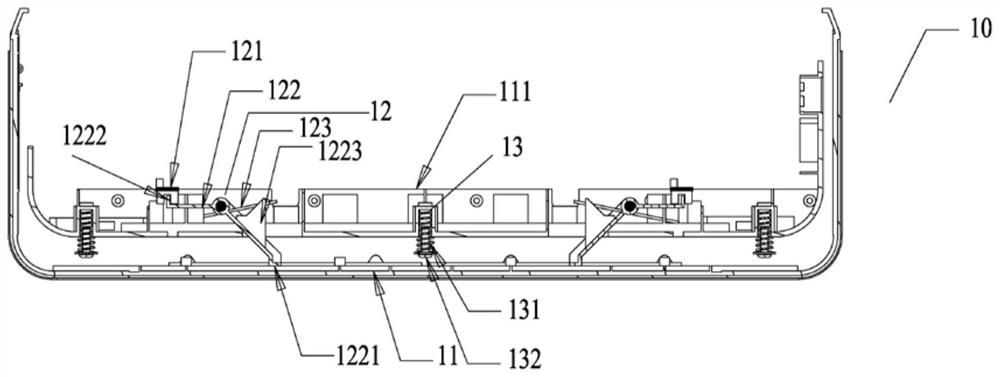
[0036] The specific implementation manner of the present application will be described below in conjunction with the accompanying drawings.
[0037] In this article, "upper", "lower", "front", "rear", "left", "right", etc. are only used to indicate the relative positional relationship between related parts, rather than to limit the absolute position of these related parts .
[0038] In this article, "first", "second", etc. are only used to distinguish each other, not to indicate the degree of importance and order, or the prerequisite for mutual existence.
[0039] Herein, "equal", "identical" and the like are not strictly restricted in the sense of mathematics and / or geometry, but also include errors understandable by those skilled in the art and allowed in manufacture or use.
[0040] Unless otherwise stated, a numerical range herein includes not only the entire range within its two endpoints, but also several subranges subsumed therein.
[0041] The present application pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com