Controllable thorn claw attachment grabbing mechanism for small celestial body detection and working method
A technology of grasping mechanism and small celestial body, applied in tools, motor vehicles, sampling devices, etc., can solve the problems of insufficient mobility of single-joint bone toe attachment, limited grasping range, etc., to enhance the attachment effect and improve grasping force and stability, good strength and shock resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the object, technical solution and effect of the present invention clearer and clearer, the following examples are given to further describe the present invention in detail. It should be pointed out that the specific implementations described here are only used to explain the present invention, not to limit the present invention.
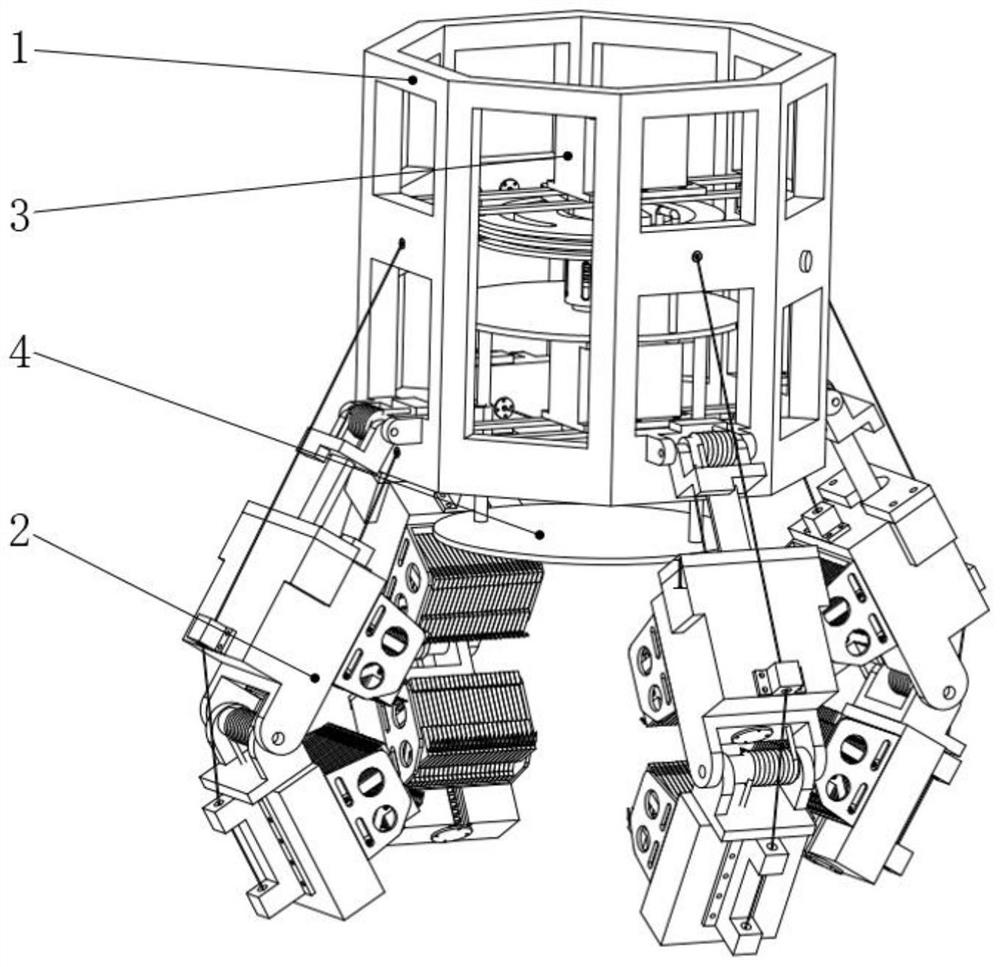
[0039] Such as Figure 1~Figure 8 As shown, a controllable stabbing attachment and grasping mechanism for small celestial body detection of the present invention mainly includes an octahedral frame 1 , bony fingers 2 , a rope drive system 3 and a contact ejector mechanism 4 . The bony toe finger 2 is linked to the outer periphery of the bottom of the octahedron frame 1 through torsion springs and pins and can rotate with it. The rope drive system 3 is fixed on the inner axis of the octahedron frame 1, and the contact ejector mechanism 4 is fixed to the rope drive system 3 down and move up and down.
[0040] Described polyph...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com