Heterogeneous unmanned system cooperative formation control system suitable for severe sea conditions and control method thereof
A control system and sea state technology, applied in the cooperative formation control system of heterogeneous unmanned systems and its control field, can solve problems such as navigation safety hazards, sensor failure, unmanned boat shaking, etc., and achieve the effect of enhancing the perception ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
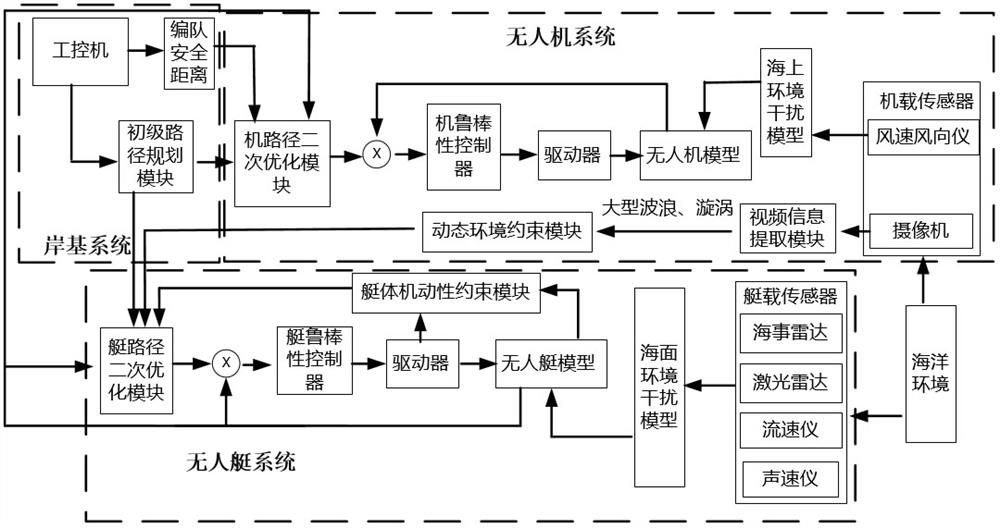
[0030] A heterogeneous unmanned system cooperative formation control system suitable for severe sea conditions, see figure 1 , including shore-based systems, unmanned aerial vehicles and unmanned boat systems; shore-based systems are connected to UAV systems and unmanned boat systems, and UAV systems are connected to unmanned boat systems; shore-based systems are used to The target point command issued by the demand generates the initial path on the chart through the primary path planning module, and transmits the initial path information to the UAV system and the UAV system respectively; The position and attitude information of the human-vehicle system and the formation safety distance information complete the secondary optimization of the path. The optimized path can form a formation with the unmanned vessel system and provide maritime safety warning for the unmanned vessel system; The marine three-dimensional environment interference information, dynamic environment constra...
Embodiment 2
[0042] The control method of the heterogeneous unmanned system cooperative formation control system in bad sea conditions described in embodiment 1 includes the following steps:
[0043] Step 1. The shore-based system generates the initial path information of the UAV system and the formation safety distance information between the UAV system and the UAV system according to the mission requirements, and transmits the initial path information to the UAV system and the UAV system respectively. system, which sends formation safety distance information to the UAV system;
[0044] Step 2, the UAV path secondary optimization module analyzes the received initial path information, UAV pose information and formation safety distance information to generate the UAV secondary path optimization information, and transmits the UAV secondary path optimization information To the machine robustness controller; the machine robustness controller receives the drone's secondary optimization path inf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com