Search and rescue unmanned aerial vehicle
A technology for drones and cleaning mechanisms, applied in the field of search and rescue drones, can solve problems such as the inability to protect the cleaning of cameras, and achieve the effect of improving efficiency and improving search and rescue rates.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
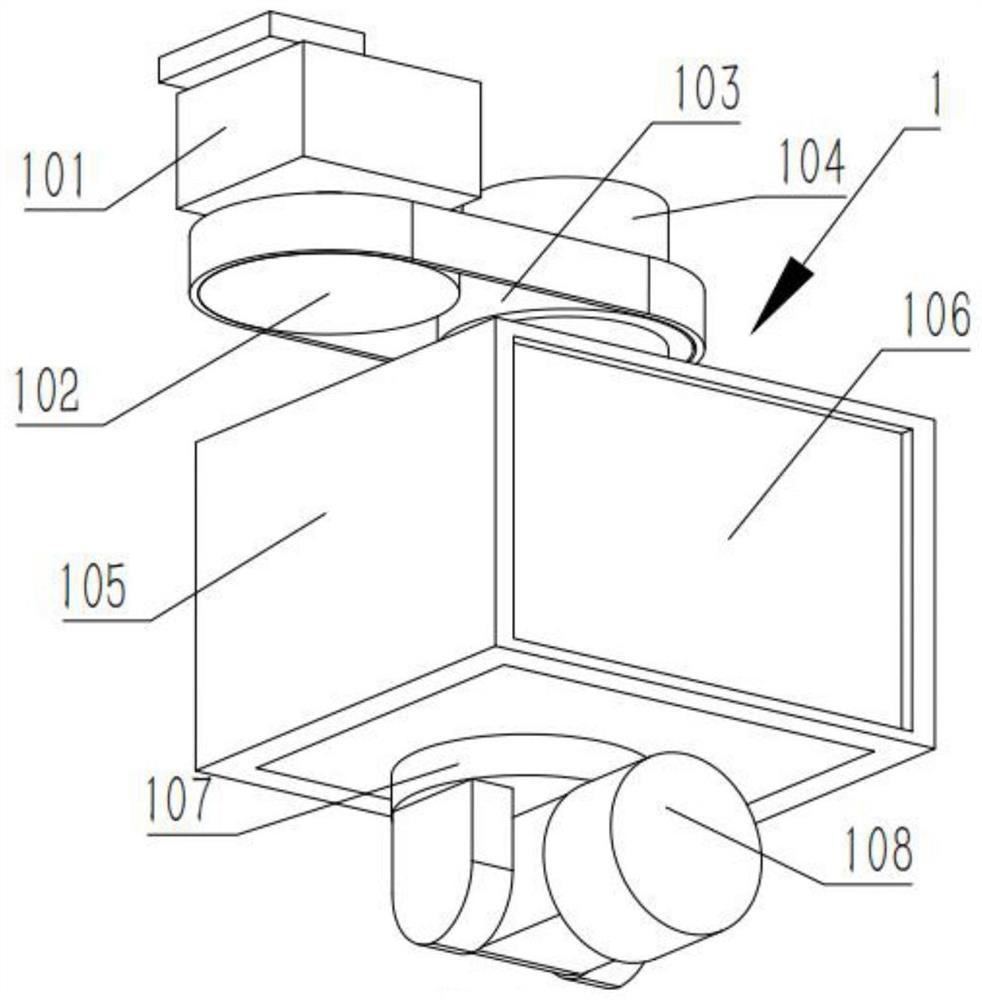
[0033] Combine below Figure 1-11 Describe this embodiment, a search and rescue drone, including an adjustment mechanism 1 and a shock absorbing mechanism 2, including a camera mechanism 1 and a cleaning mechanism 2, and the camera mechanism 1 includes an adjustment motor 101, a pulley 102, a threaded ring 103, a threaded rod 104, protective shell 105, glass plate 106, fixed plate 107 and camera 108, belt pulley 102 is fixedly connected on the output shaft of adjustment motor 101, belt pulley 102 and threaded ring 103 belt transmission, threaded ring 103 and threaded rod 104 thread transmission, thread The rod 104 is slidably connected to the protective shell 105, the protective shell 105 is provided with a glass plate 106, the fixed plate 107 is fixedly connected to the bottom end of the threaded rod 104, the fixed plate 107 is slidably connected in the protective shell 105, and the camera 108 is rotatably connected to the fixed On the plate 107, the cleaning mechanism 2 incl...
specific Embodiment approach 2
[0036] Combine below Figure 1-11 Illustrate this embodiment, this embodiment will further explain the first embodiment, the cleaning mechanism 2 also includes a sector gear 203, a brushing motor 204 and a spring 205, the sector gear 203 and the rack 202 are meshed for transmission, and the rack 202 is fixedly connected to the spring On 205, sector gear 203 is fixedly connected on the output shaft of brushing motor 204;
[0037] The output shaft of the scrubbing motor 204 drives the sector gear 203 to rotate, and the sector gear 203 rotates and meshes with the rack 202 to drive the rack 202 to move downward, stretching the spring 205, and the sector gear 203 continues to rotate without meshing with the rack 202, and the elastic force of the spring 205 drives The rack 202 moves upwards, and the rack 202 moves back and forth to drive the brush 201 to move back and forth to complete cleaning.
specific Embodiment approach 3
[0039] Combine below Figure 1-11 Describe this embodiment, this embodiment will further explain the second embodiment, the search and rescue drone also includes a body mechanism 3, the body mechanism 3 includes the drone body 301, wings 302, aircraft bracket 303, fan 304 and The heating resistor 305, a plurality of wings 302 are rotatably connected to the main body 301 of the drone, two aircraft brackets 303 are fixedly connected to the main body 301 of the drone, and the fan 304 is fixedly connected to the lower end of the main body 301 of the drone. The heating resistor 305 is fixedly connected to the lower end of the drone body 301, the adjusting motor 101 is fixedly connected to the drone body 301, the threaded ring 103 is rotatably connected to the drone body 301, and the protective shell 105 is fixedly connected to the drone body 301. The lower end of the main body 301, the spring 205 is fixedly connected in the main body 301 of the drone, the rack 202 is slidably conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com