


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Lower limb exoskeleton robot gait stabilization algorithm for medical rehabilitation and assisted walking
An exoskeleton robot, robot technology, applied in the direction of tools, instruments, computing, etc. to help people walk, can solve problems such as single gait
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The concrete implementation of algorithm of the present invention is described in further detail below in conjunction with accompanying drawing:
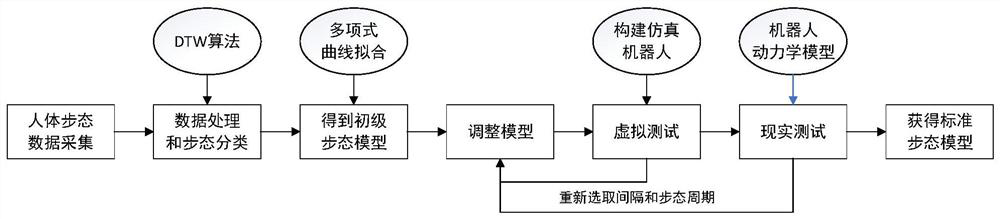
[0026] figure 1 In order to realize the block diagram of the gait stability algorithm of the lower extremity exoskeleton robot for medical rehabilitation and assisted walking, firstly, a human gait acquisition device is established to collect the gait of normal people, and the obtained data set is processed and classified, and then through the polynomial The primary gait model is obtained by curve fitting, and the final standard gait model of each classification is obtained by continuously adjusting the model after repeated virtual and reality tests. The implementation steps are as follows:
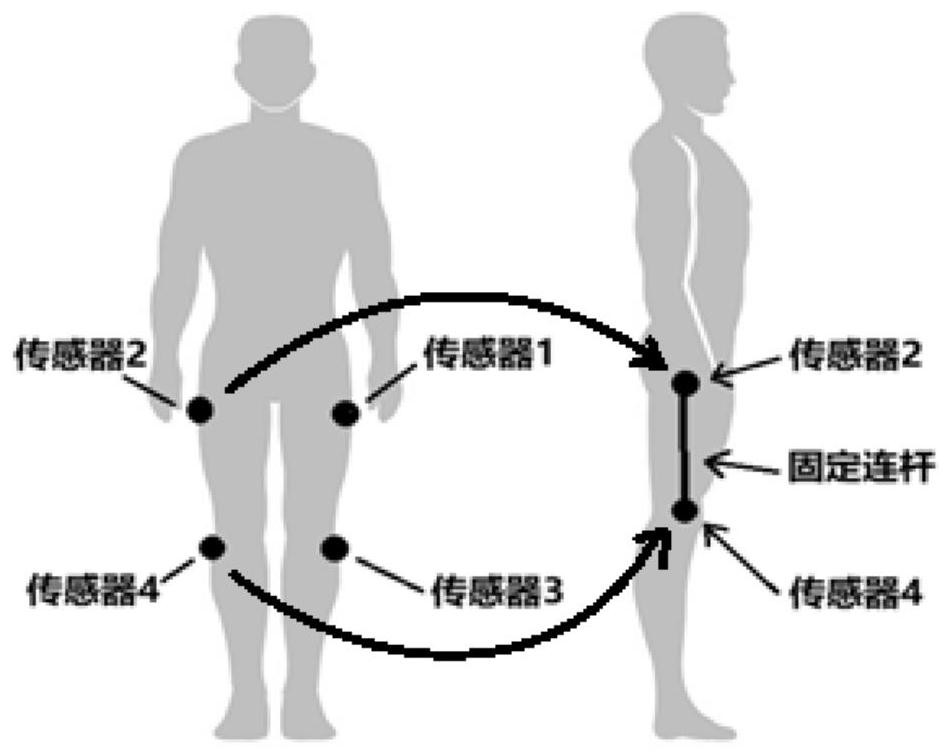
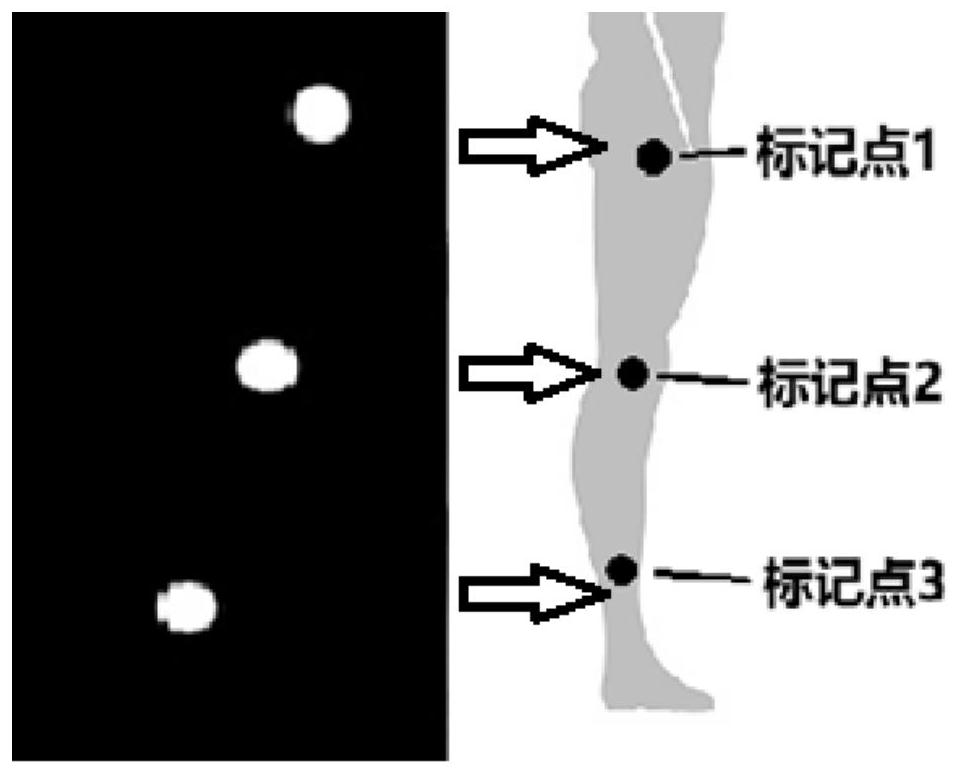
[0027] 1. According to figure 2 , and the following steps complete the data acquisition and processing work:
[0028] This program uses two methods to collect data at the same time:
[0029] Method 1: Fix four PMU6050 acceleration s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com