Vehicle automatic lane changing control method
A control method and vehicle technology, applied in the field of vehicle lane change control, can solve problems such as the inapplicability of sliding mode control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0129] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
[0130] like figure 1 As shown, a vehicle automatic lane change control method includes the following steps:
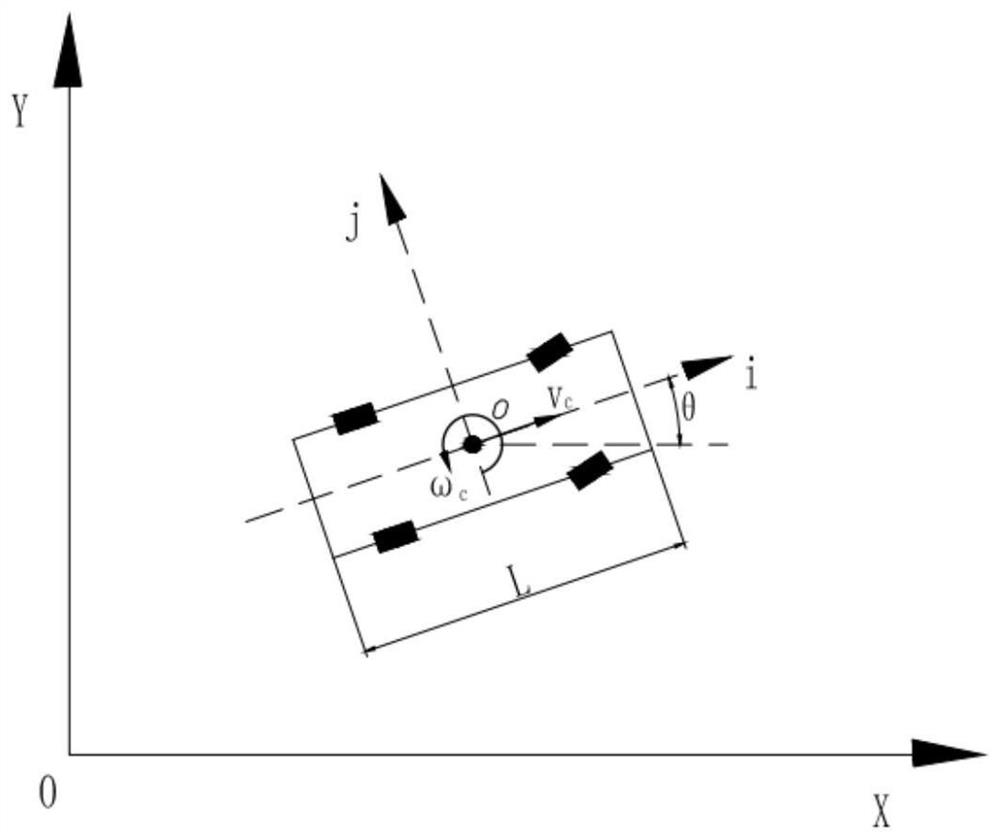
[0131] S1. Construct a two-lane five-lane road scene model, and define the pose coordinates and state space of the vehicle;
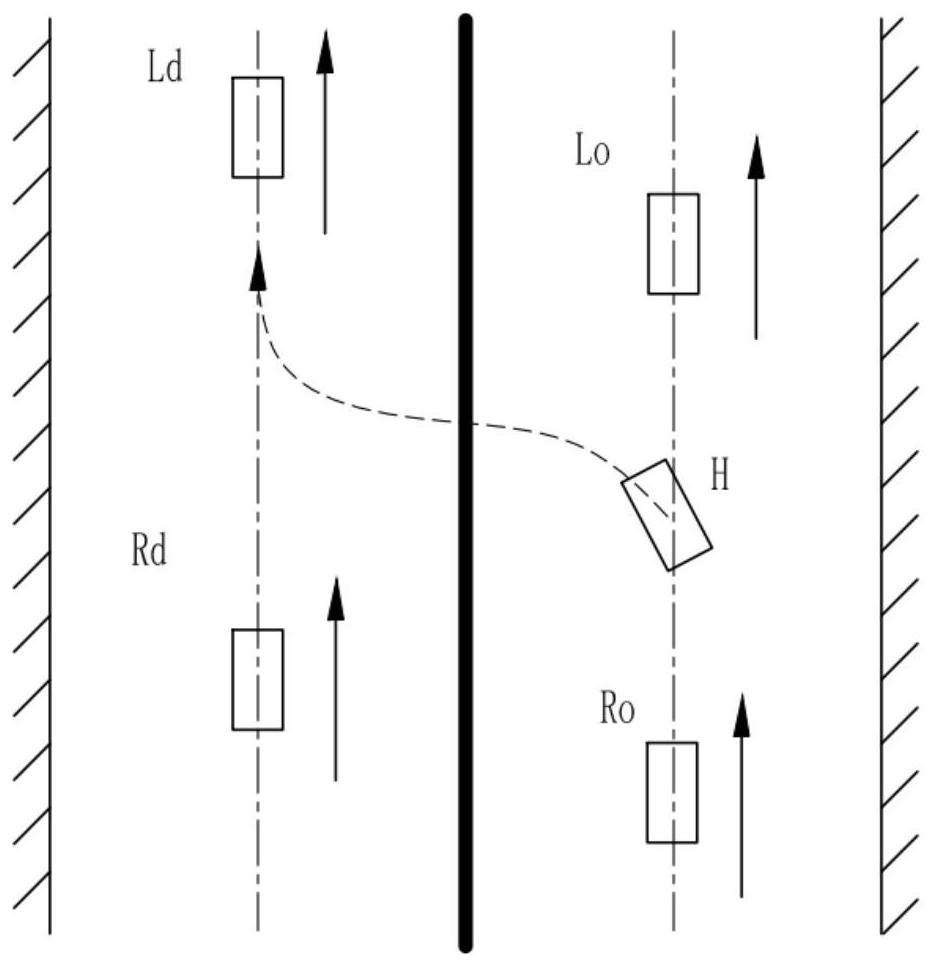
[0132] S101. Constructing a two-lane five-lane road scene model:
[0133]Suppose the main vehicle H changes lanes to the left. During the driving process of the vehicle, the surrounding environment of the vehicle generally includes four vehicles in the front and rear of the original lane and the target lane where the main vehicle H is located. In a two-lane road section, there are four related vehicles around. They are moving steadily in a straight line at a constant speed under normal conditions. The main...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com