Rigid-soft composite driver based on foldable sheet-shaped drivers
A driver and chip technology, applied in the direction of manipulators, joints, program-controlled manipulators, etc., can solve problems such as complex production processes, insufficient output force in the field of soft robots, and lack of multi-degree-of-freedom movement capabilities, so as to achieve simple overall structure design and ease of use. Great effect of learning and output
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
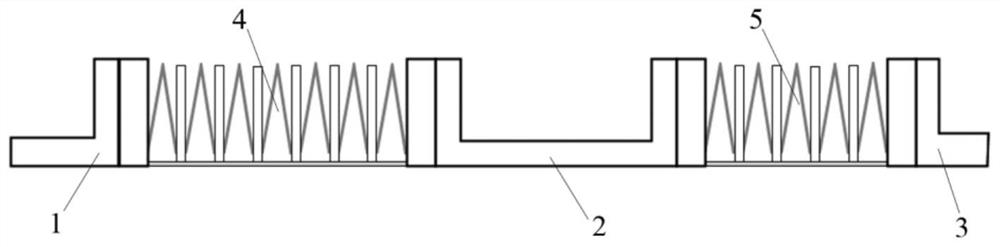
[0014] The invention relates to a rigid-soft composite driver based on a foldable sheet driver and a manufacturing method thereof. The rigid-soft composite driver mainly consists of a proximal rigid connector, a middle rigid connector, a distal rigid connector, a proximal joint driver and The distal joint driver consists of, as figure 1 shown;
[0015] The proximal rigid connector 1, the middle rigid connector 2 and the distal rigid connector 3 are 3D printed from the same material;
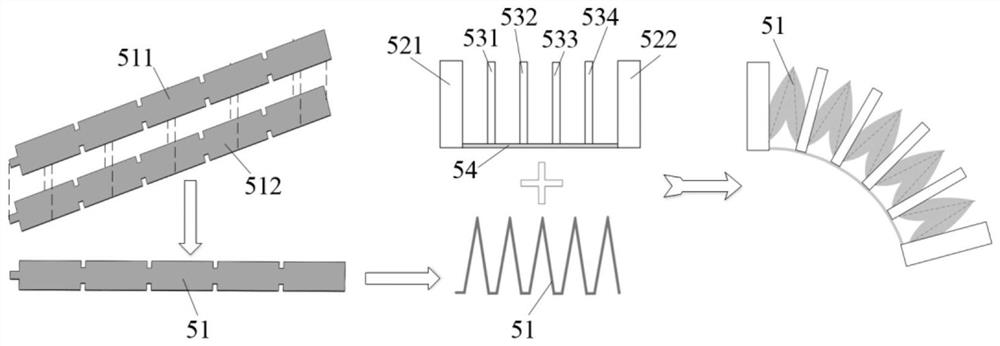
[0016] The proximal joint driver 4 and the distal joint driver 5 adopt the same material and structure, including a foldable sheet driver, a rigid partition and a strain limiting layer;
[0017] Taking the distal joint driver 5 as an example, the manufacturing method of the rigid-soft composite driver can be briefly described as follows: (1) Cut out the superstructure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com