Reentry vehicle attitude control method based on self-adaptive gain disturbance compensation
A reentry vehicle, adaptive gain technology, applied in the direction of attitude control, non-electric variable control, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
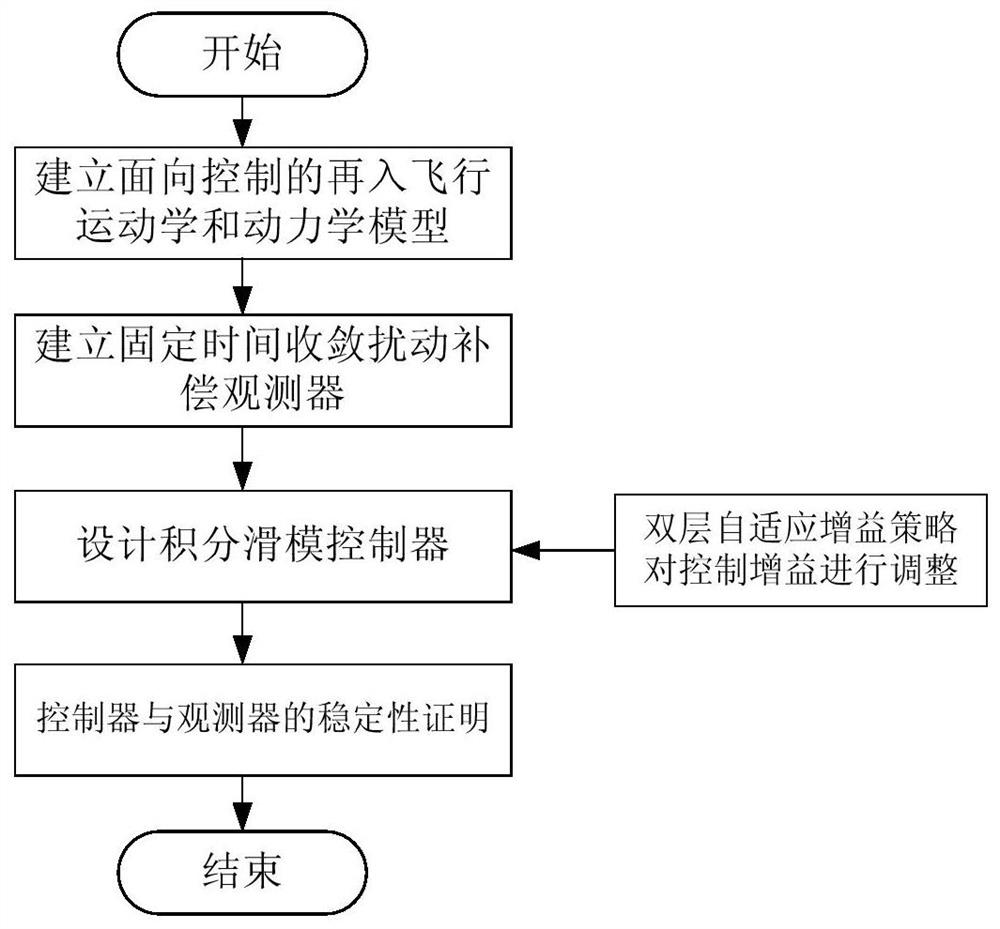
[0053] like figure 1 As shown, the present invention proposes a reentry vehicle attitude control method based on adaptive gain disturbance compensation, comprising the following steps:
[0054] (1) Reentry kinematics and dynamics modeling
[0055] The reentry kinematics and dynamics of the reentry vehicle are established as follows:
[0056]
[0057] where θ=[α,β,μ] T , α, β, μ denote attack angle, sideslip angle and roll angle respectively; ω=[ω x ,ω y ,ω z ] T , ω x ,ω y ,ω z Represents the three-channel attitude angular velocity; B represents the control matrix, u represents the control input vector; d represents the disturbance torque, ΔJ represents the moment of inertia error matrix; the expressions of the matrices R, J, and Ω are:
[0058]
[0059]
[0060]
[0061] Among them, J x , J y , J z are the principal moments of inertia of the three channels, J xy , J xz , J yz represent the inertial products between the two channels, respectively.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com