Automatic guided vehicle code loss recovery method and device and electronic equipment
A technology of automatic guidance and recovery method, applied in the field of off-code recovery, can solve problems such as affecting scheduling operation efficiency, multi-time, labor cost occupation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
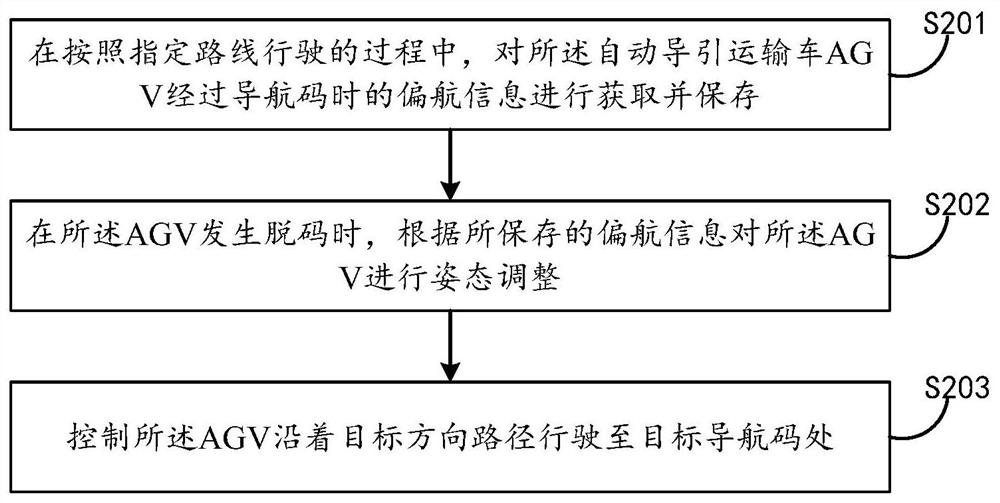
[0094] First of all, this embodiment 1 provides an automatic guided transport vehicle off-code recovery method from the perspective of the self-recovery module running in the AGV host computer, see figure 2 , the method may specifically include:
[0095] S201: During the process of driving according to the designated route, acquire and save the yaw information when the automatic guided transport vehicle AGV passes the navigation code;
[0096] Wherein, the so-called specified route may specifically refer to a route generated according to the routing scheduling instruction issued by the server, specifically may include multi-hop route segments, and in each hop, ensure that the driving route of the AGV is a straight line. In this way, even if the AGV is out of code, as long as the position and attitude of the AGV have been corrected, the AGV can collect the information of a navigation code after driving forward or backward for a certain distance, and then, in the navigation cod...
Embodiment 2
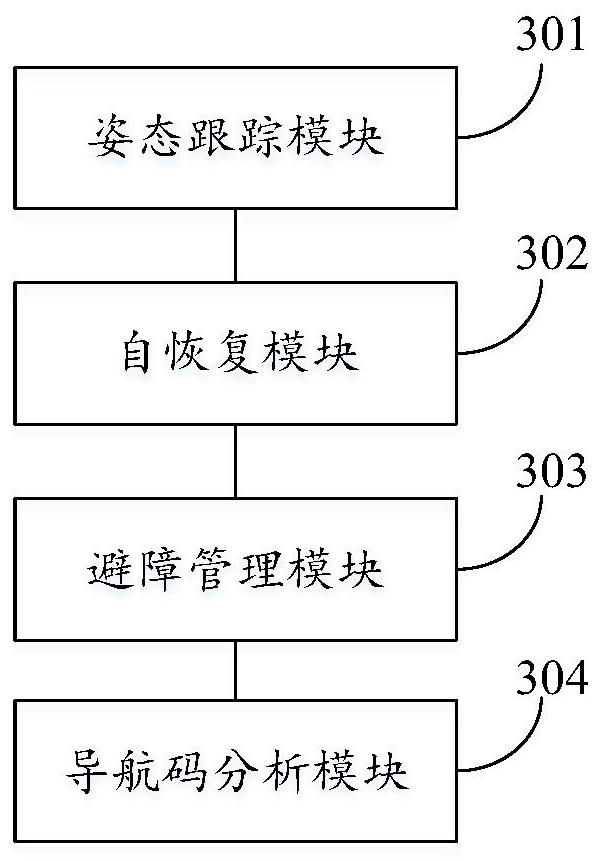
[0134] The second embodiment corresponds to the first embodiment, providing an automatic guided transport vehicle, see image 3 , which can include:
[0135] The attitude tracking module 301 is used to obtain and save the yaw information when the automatic guided transport vehicle AGV passes through the navigation code;
[0136] The self-recovery module 302 is configured to adjust the attitude of the AGV according to the stored yaw information when the AGV is out of code, and control the AGV to travel along the target direction path to the target navigation code.
[0137] In specific implementation, the AGV can also include:
[0138] The mileage tracking module 303 is used to calculate the mileage traveled by the AGV from the previous navigation code after each navigation code passed by the AGV, so as to determine the target direction according to the navigation code closer to the AGV .
[0139] In addition, the AGV can also include:
[0140] The obstacle avoidance managemen...
Embodiment 3
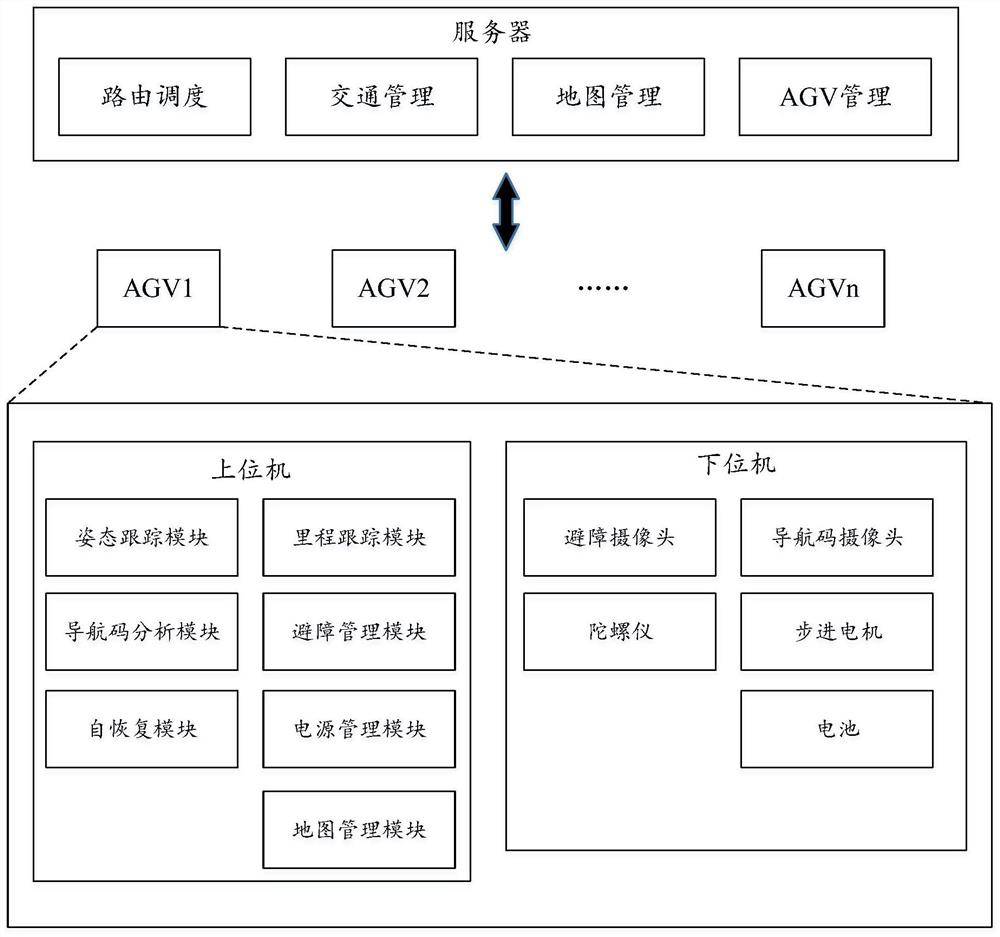
[0147] The third embodiment also provides an automatic guided transport vehicle control system, specifically, see Figure 4 , the system can include:
[0148] The server 401 is used to perform routing scheduling on the AGV according to the real-time position and the destination navigation code of the automatic guided transport vehicle AGV, and when the target AGV is uncoded, according to the location where the target AGV was before the uncoded The position of the last navigation code determines the target area, and controls other AGVs to wait outside the target area;
[0149] The AGV controller 402 is used to acquire and save the yaw information of the target AGV when it passes the navigation code, and adjust the attitude of the target AGV according to the saved yaw information when the target AGV is out of code , and control the target AGV to travel along the target direction path to the target navigation code;
[0150] The server 401 is further configured to, after the tar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com