Hierarchical feature fusion method for multi-target detection of mobile robot
A mobile robot and target detection algorithm technology, which is applied in the field of environmental perception of mobile robots, can solve the problems of low detection ability and insufficient feature extraction, and achieve the effect of improving detection ability and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
[0030] as attached figure 1 As shown, the present invention is a layered feature fusion method for mobile robot multi-target detection, comprising the following steps:
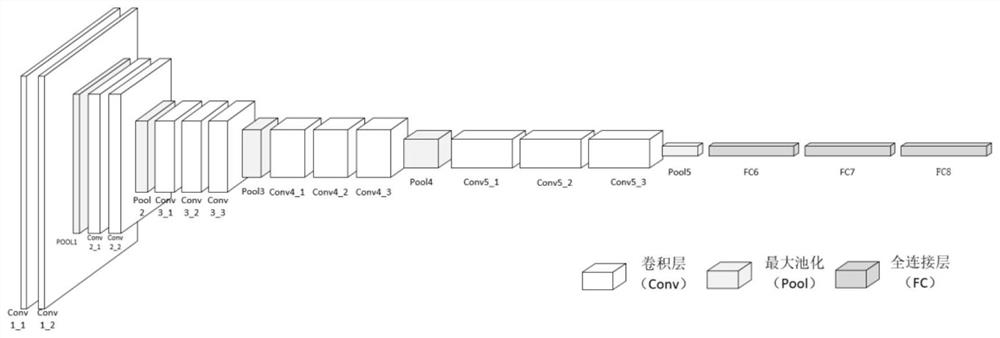
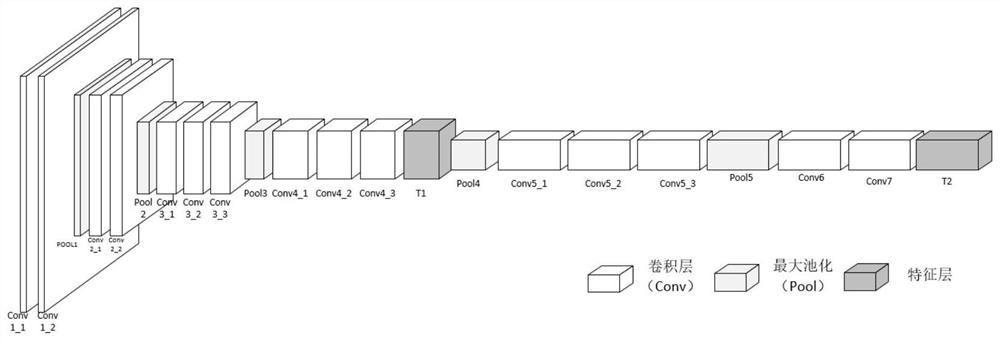
[0031] Step 1: Initially obtain the feature map, and input the images in the dataset into the pre-trained improved VGG-16. The VGG-16 network structure is shown in Figure 2(a): it consists of 13 convolutional layers and 3 fully connected layers. The convolutional layers are Conv1_1, Conv1_2, Conv2_1, Conv2_2, Conv3_1, Conv3_2, Conv3_3, Conv4_1, Conv4_2 , Conv4_3, Conv5_1, Conv5_2, Conv5_3, the fully connected layers are FC6, FC7, FC8 in turn; the improved VGG-16 network structure is shown in Figure 2(b): change the FC6 and FC7 fully connected layers of the VGG-16 network to is the convolutional layer; the initially acquired feature map T described in step 1 1 is the output o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com