Automatic driving vehicle longitudinal control method and system with environment self-adaptive capacity
A technology of longitudinal control and automatic driving, which is applied in the field of longitudinal control of self-driving vehicles, and can solve the problem of large longitudinal following error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0076] The preferred embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
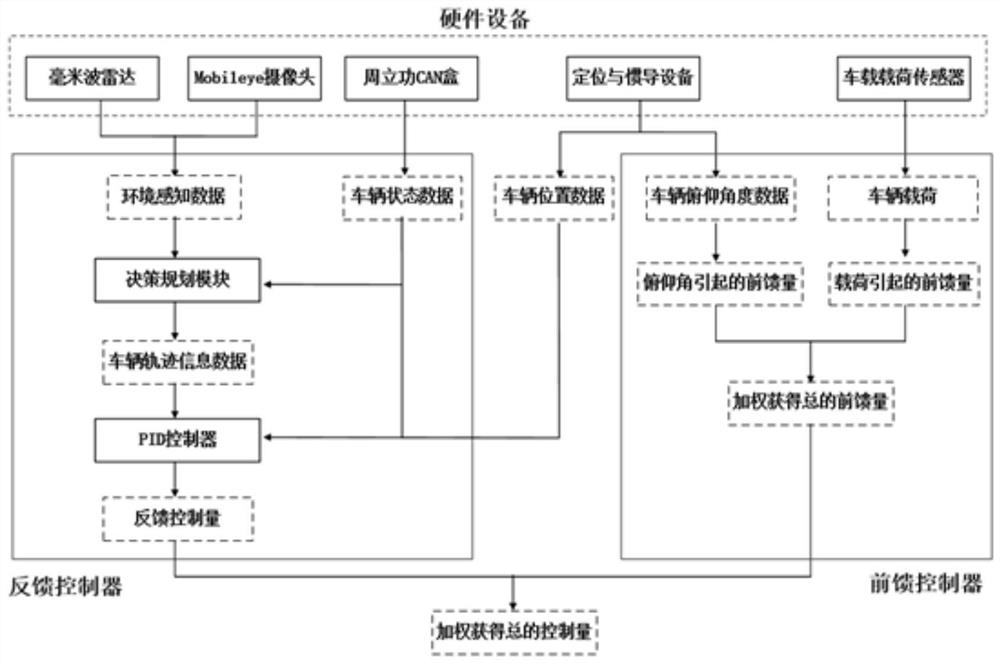
[0077] Such as figure 1 As shown, a self-driving vehicle longitudinal control system with environmental self-adaptive capability, involving hardware devices including Mobileye camera, Continental millimeter-wave radar, Huatest P2 positioning and inertial navigation equipment, Zhou Ligong CAN box, vehicle load sensor wait. The automatic driving system is divided into three modules: perception module, decision planning module and control module. The perception module perceives the surrounding environment information of the vehicle in real time through sensors such as cameras and radars, and informs the vehicle of the area of interest through the fusion algorithm. The decision-making planning module calculates the optimal driving decision-making plan based on the perception information and the real-time status information of the vehicle. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com