Hand exoskeleton system and control method
An exoskeleton and hand technology, applied in the field of exoskeleton robots, can solve the problems of cumbersome control process, poor real-time performance, delay, etc., to simplify the control process, improve the user experience, and reduce the volume and cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
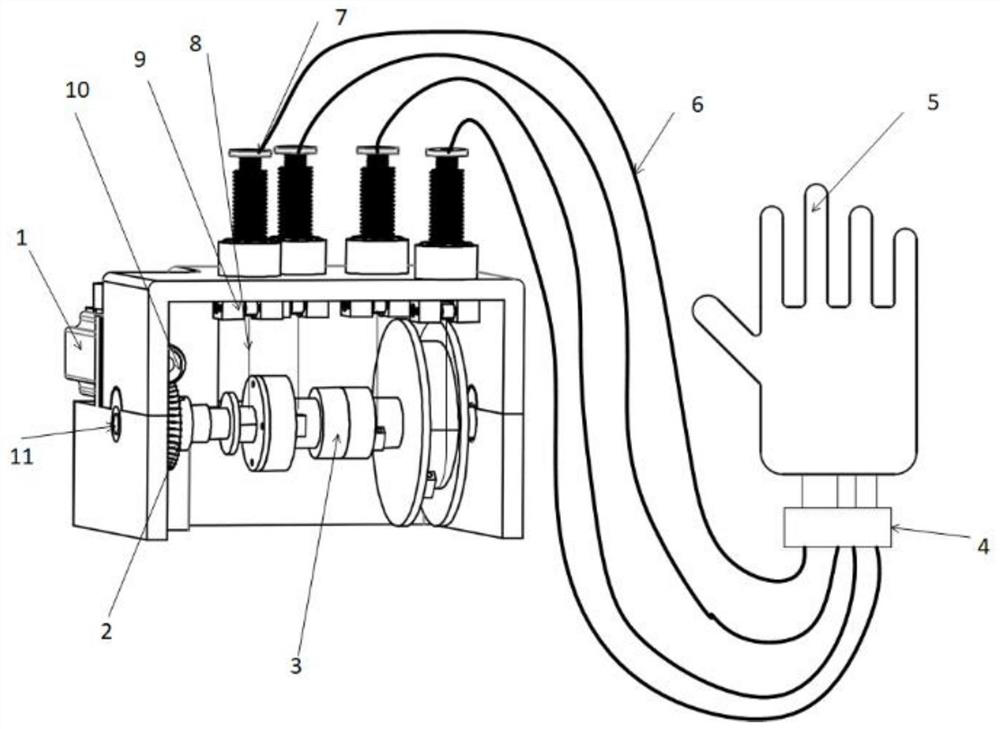
[0041] The present invention provides that the hand exoskeleton robot system of this invention includes a soft glove module, a drive module, a detection and control module, and the overall diagram is as follows figure 1 shown.
[0042] (1) Soft Glove Module
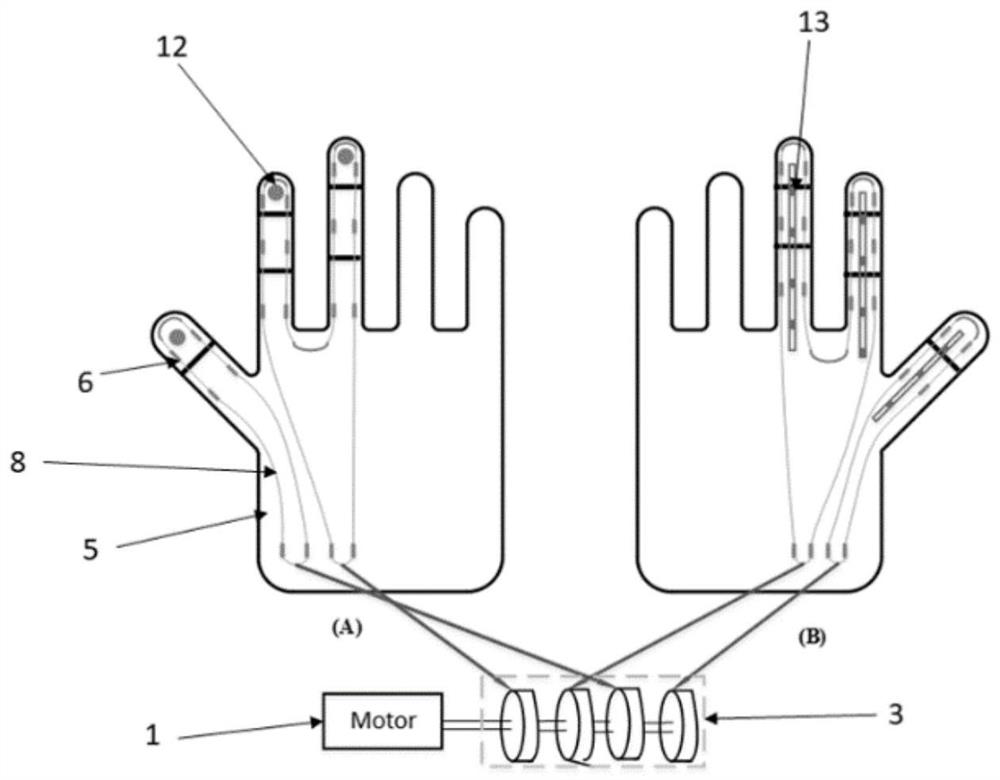
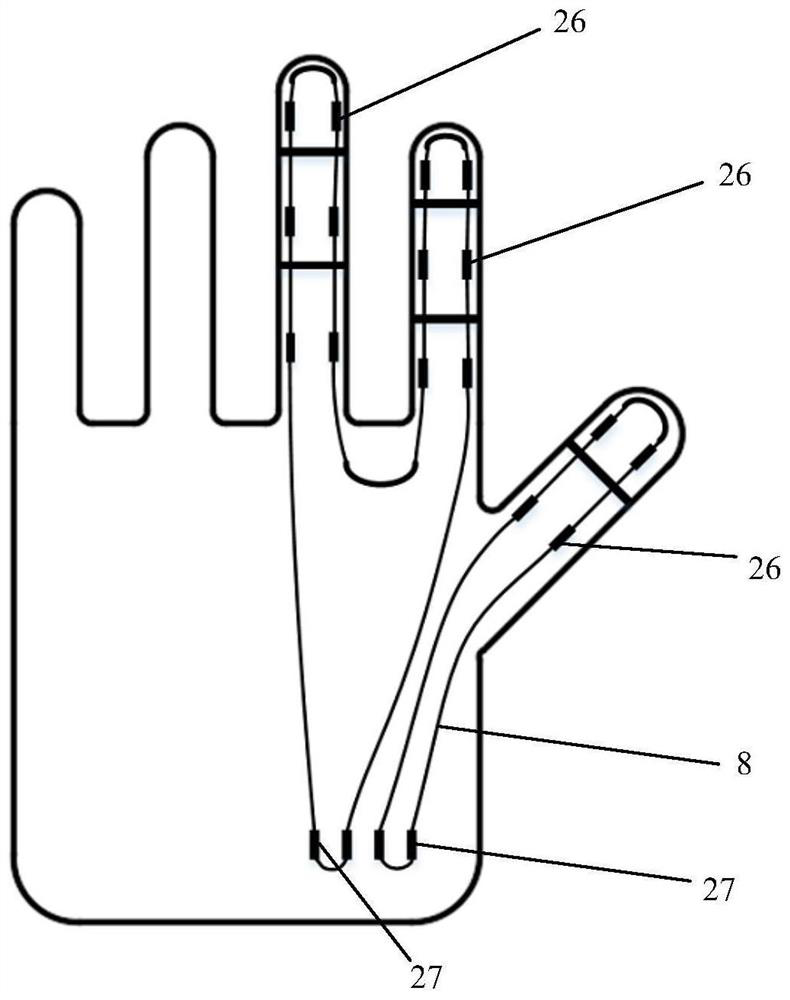
[0043] In order to improve the user's body feeling, it is based on soft gloves, which are well adapted to the shape of the human hand. Figure 2 and image 3 shown. Relevant studies have shown that most tasks in life can be completed by the thumb, index finger and middle finger, while the ring finger and little finger assist these three fingers to complete the work. Therefore, in this embodiment, active control is performed on the thumb part, the index finger part and the middle finger part of the glove. In other implementation manners, different fingers may also be selected ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com