Natural energy driven unmanned ship route real-time optimization method considering wave propulsion and navigation method
An unmanned boat and natural energy technology, which can be used in propulsion-based emission reduction, two-dimensional position/channel control, non-electric variable control, etc., and can solve problems such as inapplicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
[0036] Specific implementation mode one: refer to figure 2 and image 3 Specifically illustrate the present embodiment, the real-time route optimization method of the natural energy driving unmanned boat considering wave propulsion described in the present embodiment is as follows:
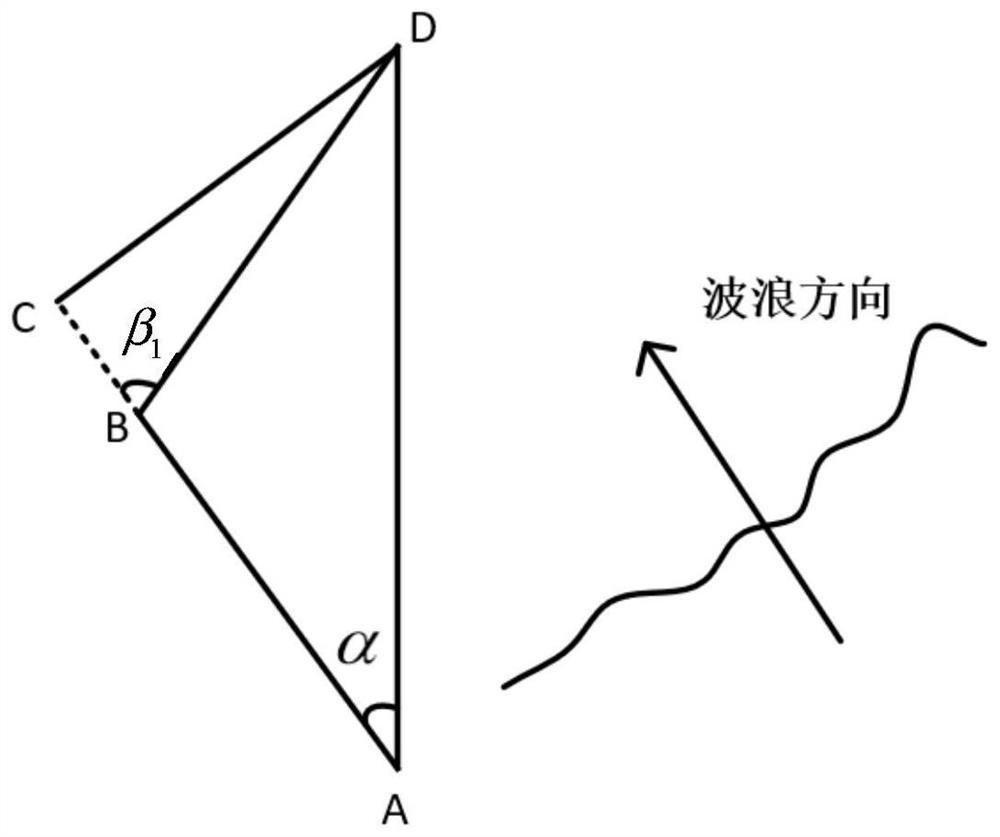
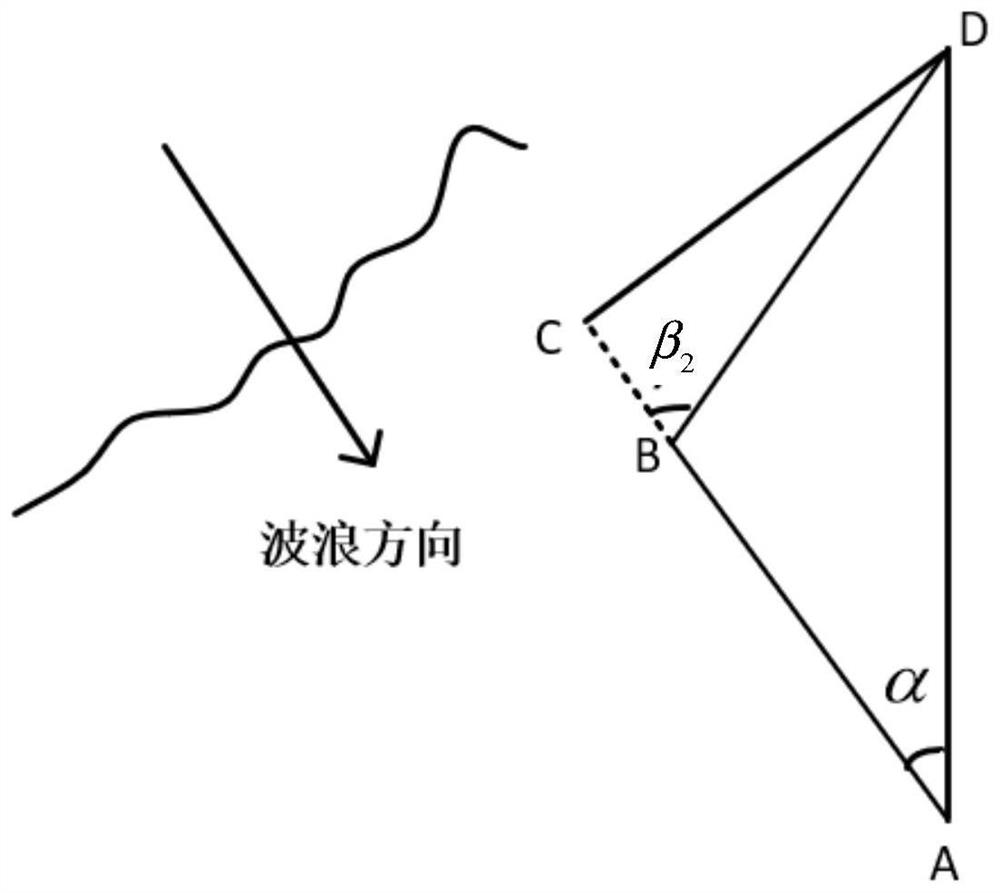
[0037] During the voyage of the unmanned boat, the bow is calculated as 0 degrees, the wave encounter angle α in the interval of clockwise rotation to 180 degrees is 0 to -180 degrees (not including 180 degrees), and the wave encounter angle α in the interval of counterclockwise rotation to 180 degrees The encounter angle α is 0 to 180 degrees (including 180 degrees). Among them, when α∈(-90, 90), it is called a straight wave; when α∈(-90,-180)∪(90,180], it is called a top wave; when α=90, it is called a cross wave.
[0038] When α=90, the unmanned boat encounters a transverse wave, the direction of the wave is perpendicular to the forward direction of the unmanned boat, and the thrust cannot b...
specific Embodiment approach 2
[0047] Specific implementation mode two: refer to the figure figure 1 , figure 2 and image 3 Specifically illustrate this embodiment, the navigating method of the natural energy-driven unmanned boat that considers wave propulsion described in this embodiment, comprises the following steps:
[0048] Step 1: Under the condition of using natural energy to drive the unmanned vessel, plan the offline path of the unmanned vessel on the grid map according to the mission requirements and the capture requirements of the energy system, and obtain the discrete navigation in the offline path. trace point. Among them, there are no obstacles between track points and the unmanned boat can pass through each track point. Let i be the serial number of each track point and the initial value of i is 0.
[0049] Step 2: Use natural energy to drive the unmanned boat to sail from the i-th track point to the i+1-th track point, and at the same time collect the wave environment near the i-th trac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com