


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A multi-platform foundation pile ROV collaborative operation system and method
An operating system and multi-platform technology, applied in the direction of control/regulation system, instrument, vehicle position/route/height control, etc., can solve problems that cannot be used to guide multi-platform ROV synergy, etc., to save navigation time, reduce Coordinating time and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
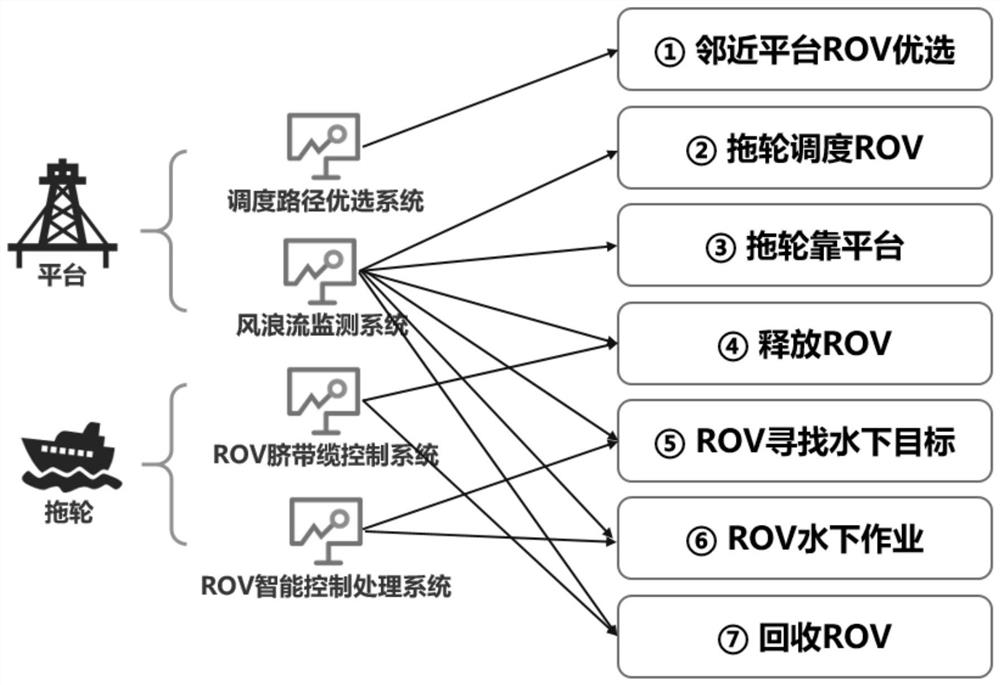
[0062] A multi-platform foundation pile ROV collaborative operation system, such as figure 1 As shown, including dispatching route optimization system, wind wave and current monitoring system, ROV umbilical cable control system and ROV intelligent control system;
[0063] The dispatching route optimization system is used to: based on the current position of the tugboat, the position of the demand platform and the position of the platform with available ROV, based on the optimization principle, to optimize an optimal tugboat route; the wind, wave and current monitoring system is used to: find out about The relevant parameters of the marine environment; the ROV umbilical cable control system is used to: automatically control the lowering and recovery speed of the umbilical cable; the ROV intelligent control system is used to: intelligently control the ROV to find underwater targets and ROV underwater operations.
[0064] Such as image 3 As shown, the ROV umbilical cable contro...
Embodiment 2
[0066] A multi-platform foundation pile ROV collaborative operation method, based on the multi-platform foundation pile ROV collaborative operation system described in embodiment 1, such as figure 2 As shown, for the technical failure of the ROV carried by the current platform itself or when encountering an emergency or to improve work efficiency, multiple ROVs are often required to work together. At this time, it is necessary to call the ROV to the adjacent platform. Specifically, in order to complete the collaborative construction of ROV, it is necessary for the platform, tugboat and ROV to work together, including the following steps:
[0067] (1) Optimize the adjacent platform ROV; based on the current position A of the tugboat, the position of the demanded platform B and the platform position of the available ROV, through the dispatching route optimization system, based on the optimization principle, an optimal tugboat route is selected;
[0068] (2) tugboat scheduling R...
Embodiment 3
[0075] According to a kind of multi-platform foundation pile ROV collaborative operation method described in embodiment 2, its difference is:
[0076] In step (1), preferably adjacent platform ROV, comprises steps as follows:
[0077] A. Start the scheduling path optimization system, and globally initialize the parameters of the scheduling path optimization system;
[0078] B. Input the position of the required platform, the current position of the tugboat, the position of the platform with available ROVs, and the number of required ROVs in the scheduling route optimization system;
[0079] C. Read the relevant parameters about the marine environment obtained through the wind, wave and current monitoring system. The relevant parameters about the marine environment include average wind speed, wind direction, average wave wavelength, average period, average wave speed, average wave height, flow direction and current velocity, and calculate the affected The comprehensive path co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com