Heuristic algorithm-based underwater glider path planning method
An underwater glider and heuristic algorithm technology, applied in calculation, calculation model, genetic model, etc., can solve the problems of not being able to guarantee the global optimal solution, reducing algorithm efficiency, and slow convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
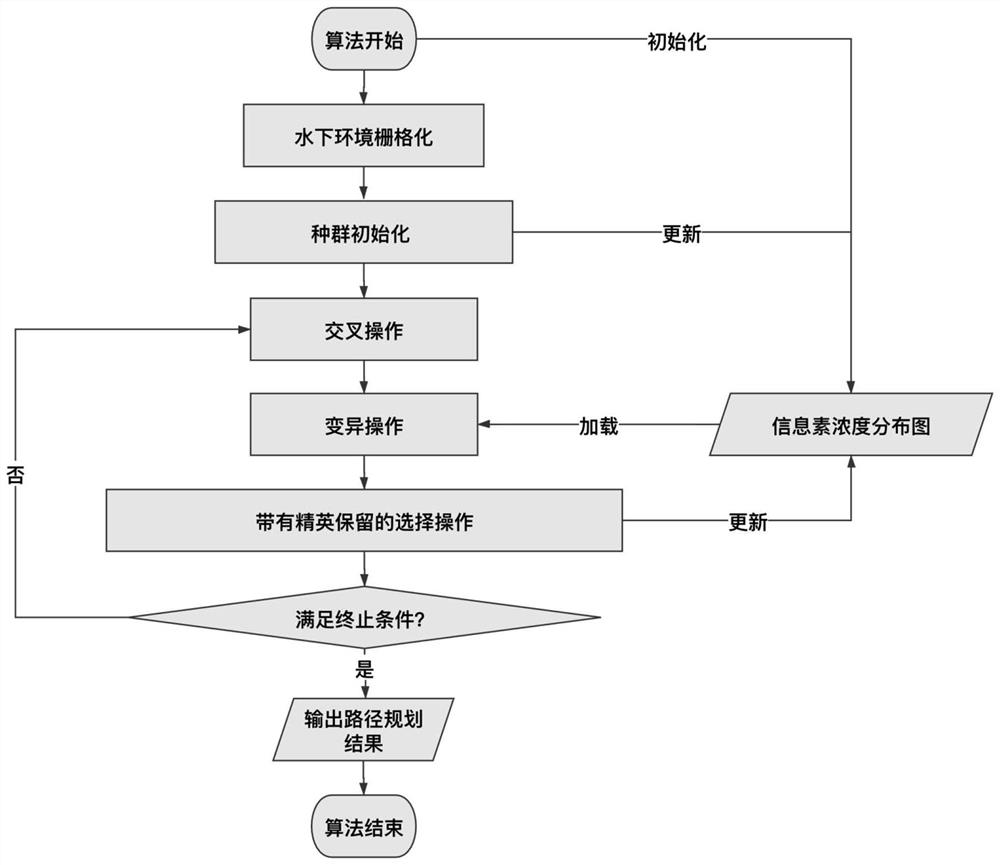
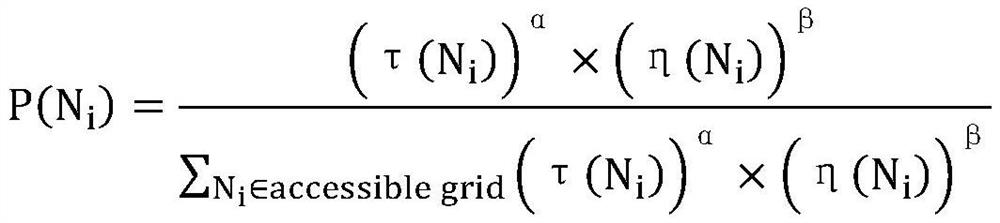
[0022] This patent integrates the genetic algorithm and the ant colony algorithm, the purpose of which is to improve the convergence speed of the path planning algorithm and improve the quality of the obtained solution. The core idea of the ant colony algorithm is introduced into the mutation operator of the genetic algorithm to realize the fusion of the two heuristic algorithms. The inability to make full use of the feedback information in the system leads to a gradual decline in the speed of its convergence to the optimal solution, and the performance of the fusion algorithm will be better than that of the single heuristic algorithm.
[0023] The best embodiment of the present invention is as follows:
[0024] Step 1: Rasterize the underwater environment, complete the environment modeling, and determine the grid position where the starting point and end point of the planned path are located.
[0025] Step 2: Initialize the population. The information stored in the chromos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com