Intelligent fleet longitudinal following control method based on fuzzy model predictive control
A technology of predictive control and fuzzy model, applied in the field of vehicle formation control, can solve the problems of unable to adapt to the driving environment, unable to meet the longitudinal following and stability of the unmanned fleet.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
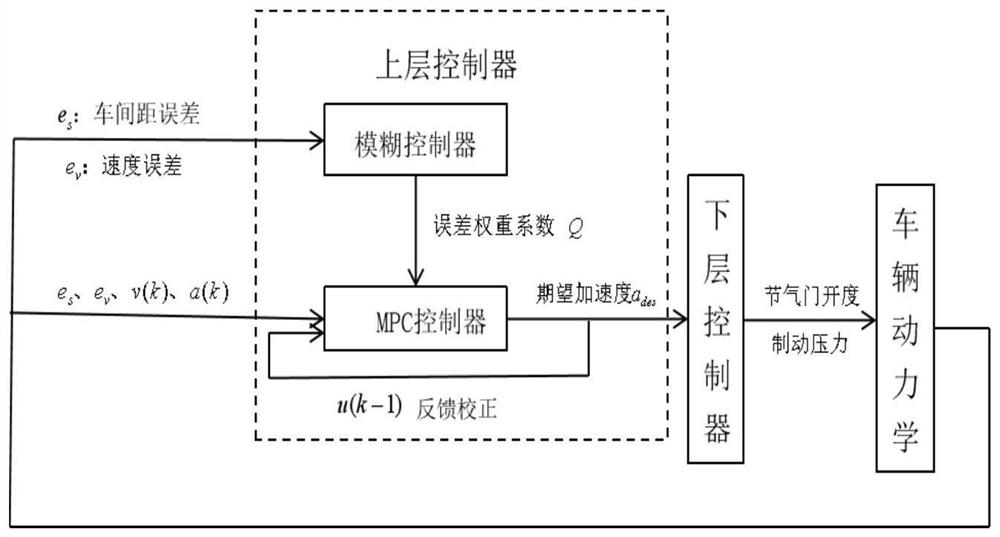
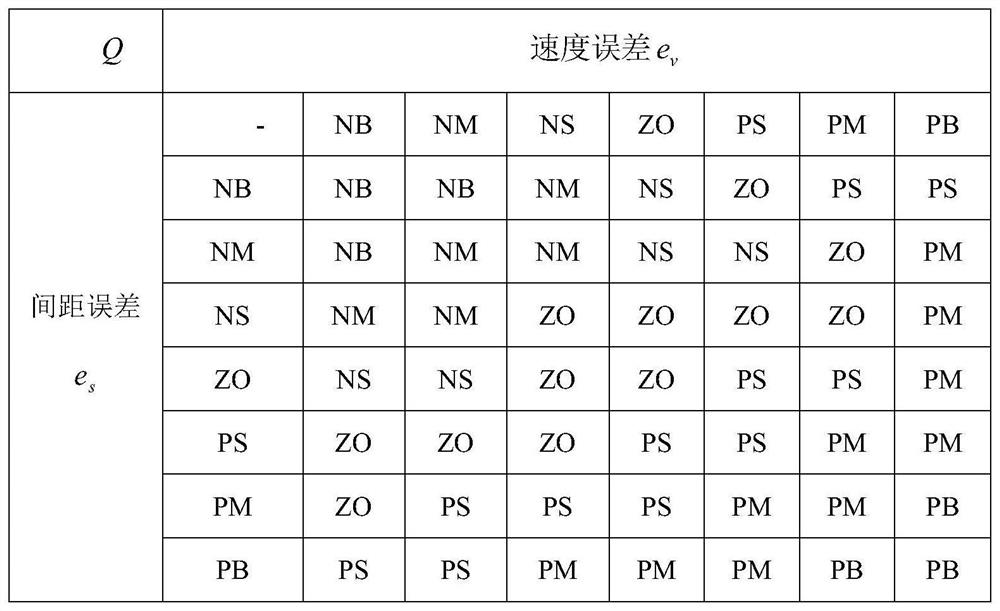
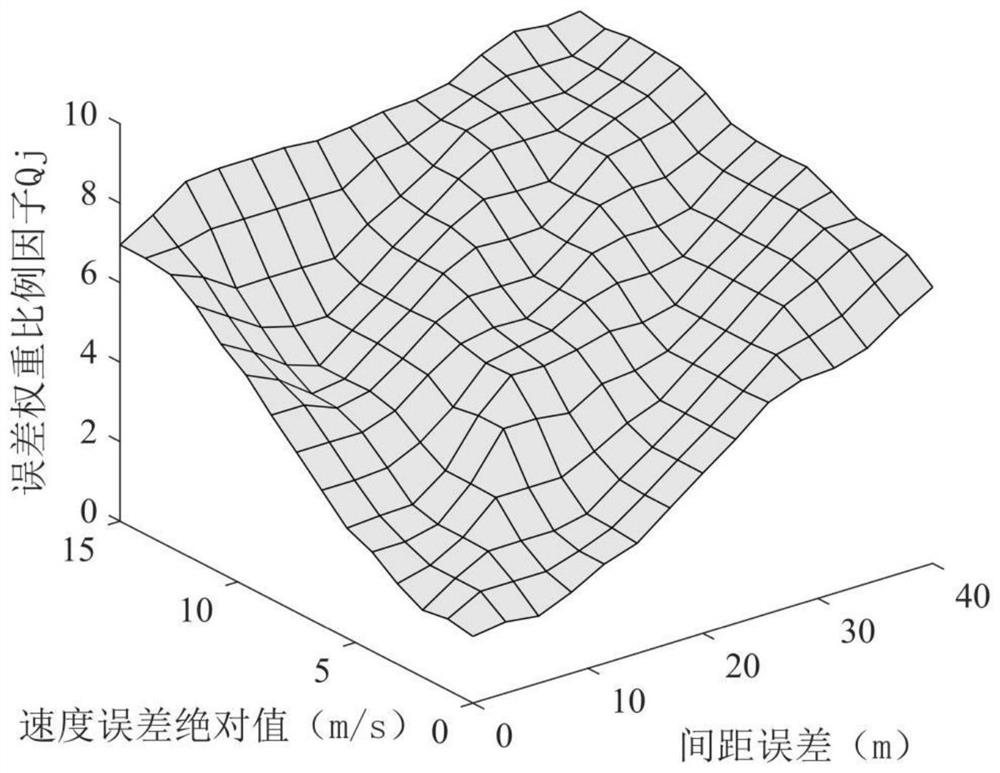
[0069] Such as figure 1 As shown, an intelligent platoon longitudinal following control system based on fuzzy model predictive control adopts an upper-lower hierarchical structure. The upper-level controller includes a fuzzy controller and a model predictive controller. , the output error weight coefficient scaling factor Q j as input to the model predictive controller. According to the vehicle information and the variable error weight coefficient Q, the model predictive controller performs online rolling optimization to solve the ideal acceleration. The lower-level controller is responsible for converting the ideal acceleration output by the upper-level controller into throttle opening or brake pressure and transmitting it to the vehicle's actuators to control the vehicle to achieve longitudinal follow-up smoothly and quickly.
[0070] Concrete embodiment of the present invention and implementation steps are as follows:
[0071] The first step is to establish a longitudina...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com