Pose estimation method and device, equipment and medium
A pose estimation and feature block technology, applied in the computer field, can solve problems such as inaccurate positions, achieve accurate coordinate information, and improve accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
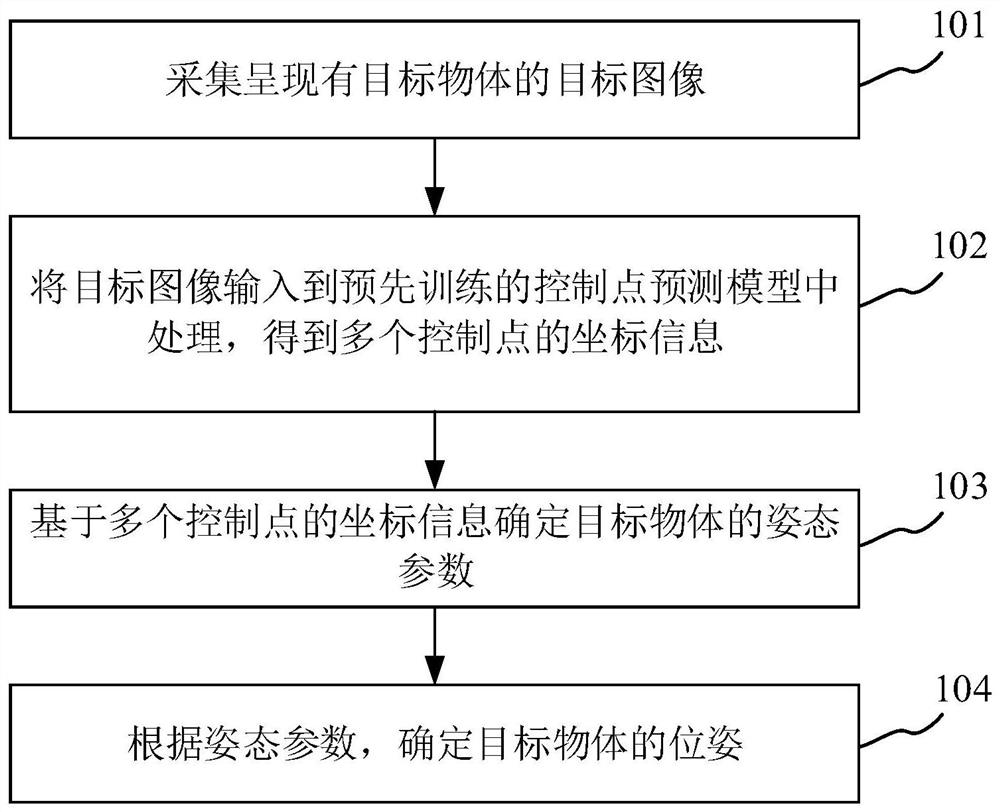
[0065] see figure 1 , the embodiment of the present application provides a pose estimation method, including:
[0066] Step 101, collecting a target image showing a target object.
[0067] Wherein, the above-mentioned target object may be various objects. As an example, the above-mentioned target object may be a beverage bottle, a stone, a person, a puppy, and the like.
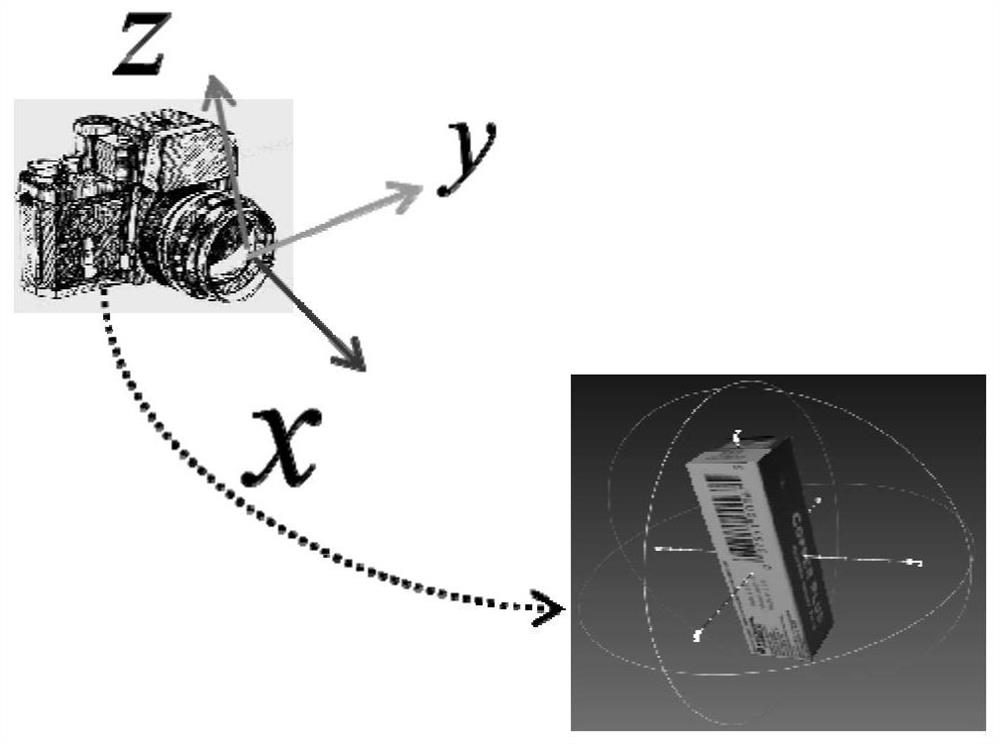
[0068] In this embodiment, the execution body of the pose estimation method may be a smart device, such as a smart robot, an unmanned vehicle, and the like. The above-mentioned execution subject may collect the above-mentioned target image through the camera installed on the smart device.
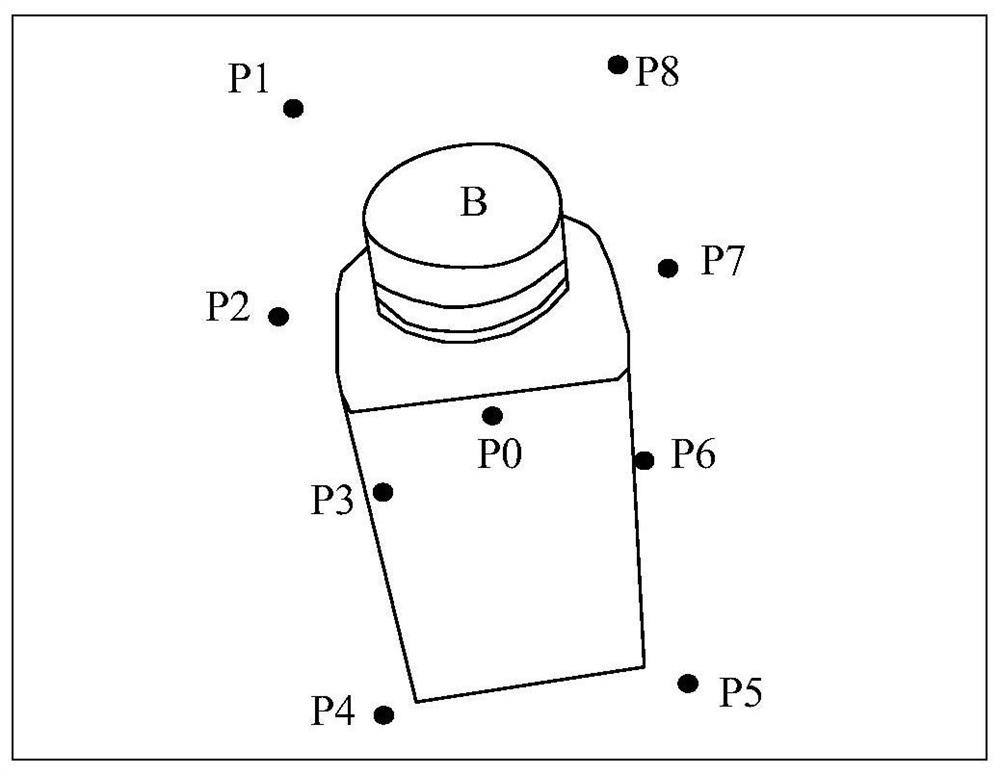
[0069] Step 102, input the target image into the pre-trained control point prediction model for processing, and obtain coordinate information of multiple control points.
[0070] Among them, multiple control points are used to describe the contour of the target object. Here, the control points are points describing th...
Embodiment 2
[0153] An embodiment of the present application provides a pose estimation method. This embodiment is a further description of Embodiment 1. For the same or similar parts as Embodiment 1, please refer to the relevant description of Embodiment 1 for details, and details will not be repeated here. see Figure 5 , the pose estimation method in this embodiment includes:
[0154] Step 501, collecting a target image showing a target object.
[0155] Step 502, input the target image into the pre-trained control point prediction model for processing, and obtain coordinate information of multiple control points.
[0156] Among them, multiple control points are used to describe the outline of the target object, and the processing of the target image by the control point prediction model includes extracting multi-scale feature information from the target image, and determining the coordinate information of multiple control points based on the multi-scale feature information. The scale ...
Embodiment 3
[0168] An embodiment of the present application provides a pose estimation method. This embodiment is a further description of Embodiment 1. For the same or similar parts as Embodiment 1, please refer to the relevant description of Embodiment 1 for details, and details will not be repeated here. see Figure 6 , the pose estimation method in this embodiment includes:
[0169] Step 601, collecting a target image showing a target object.
[0170] Step 602, input the target image into the pre-trained control point prediction model for processing, and obtain coordinate information of multiple control points.
[0171] Among them, multiple control points are used to describe the outline of the target object, and the processing of the target image by the control point prediction model includes extracting multi-scale feature information from the target image, and determining the coordinate information of multiple control points based on the multi-scale feature information. The scale fe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com