Unmanned system cluster control method based on deep reinforcement learning
A technology of reinforcement learning and cluster control, applied in two-dimensional position/channel control, vehicle position/route/altitude control, control/regulation system and other directions, which can solve problems such as poor environmental adaptability of unmanned system cluster control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
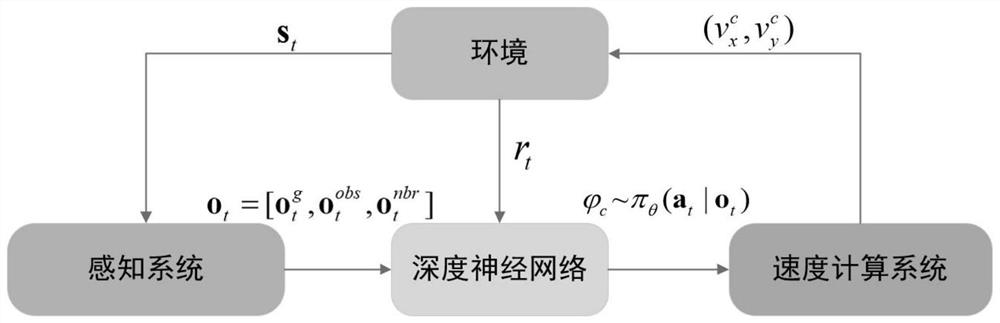
[0056] according to figure 1 As shown, the present invention provides a method for controlling unmanned system clusters based on deep reinforcement learning, specifically:
[0057] A method for unmanned system swarm control based on deep reinforcement learning, comprising the following steps:
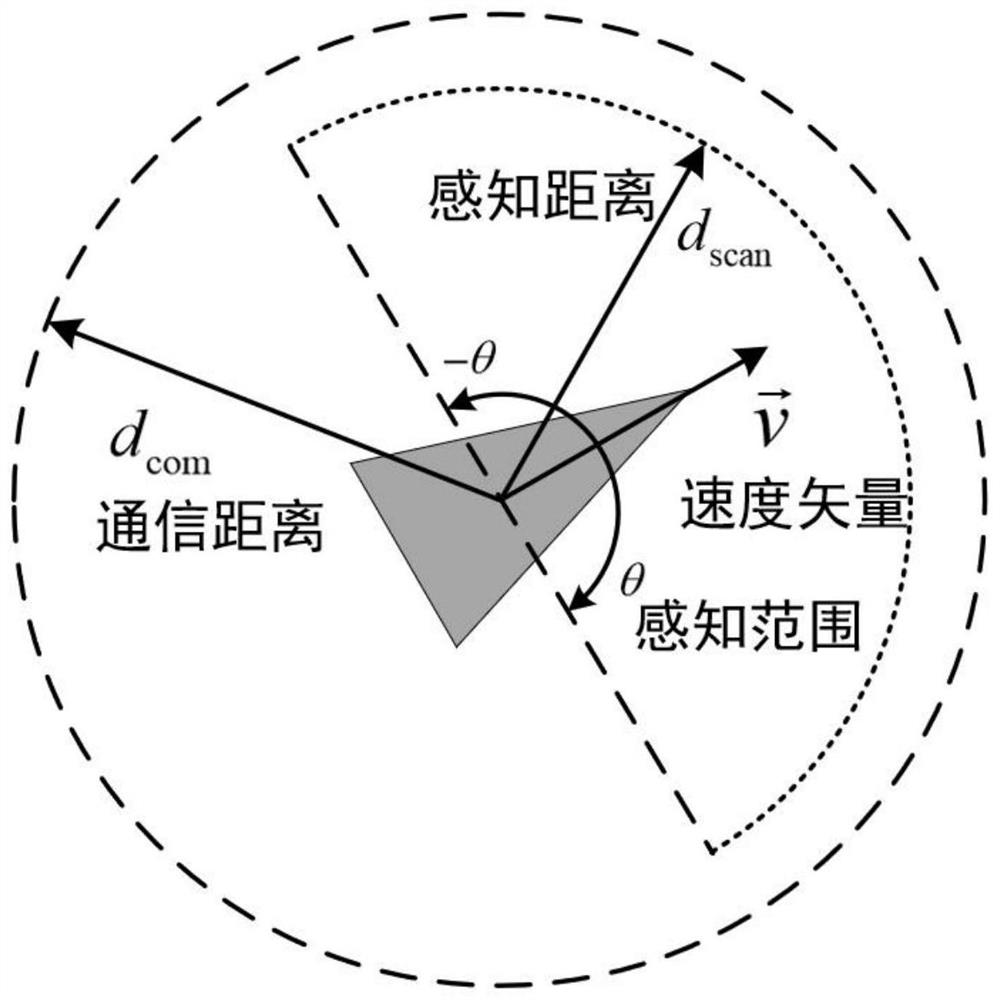
[0058] Step 1: Form an unmanned system cluster by N unmanned systems, according to figure 1 As shown, the information of the surrounding environment is detected by the sensors of each unmanned system, and the information of the surrounding environment includes target information, obstacle information and surrounding unmanned system information; its communication range and perception range are as follows image 3 shown.
[0059] The step 1 is specifically:
[0060] The information of the surrounding environment is detected by the communication equipment and perception sensors of each unmanned system, and the target information, obstacle information and surrounding unmanned system info...
specific Embodiment 2
[0095] The experiment of the present invention adopts the digital model of the rotor UAV to carry out simulation verification.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com