Offline map matching method
A matching method and offline map technology, which can be used in radio wave measurement systems, satellite radio beacon positioning systems, measurement devices, etc., and can solve the problems of low matching efficiency and low matching accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
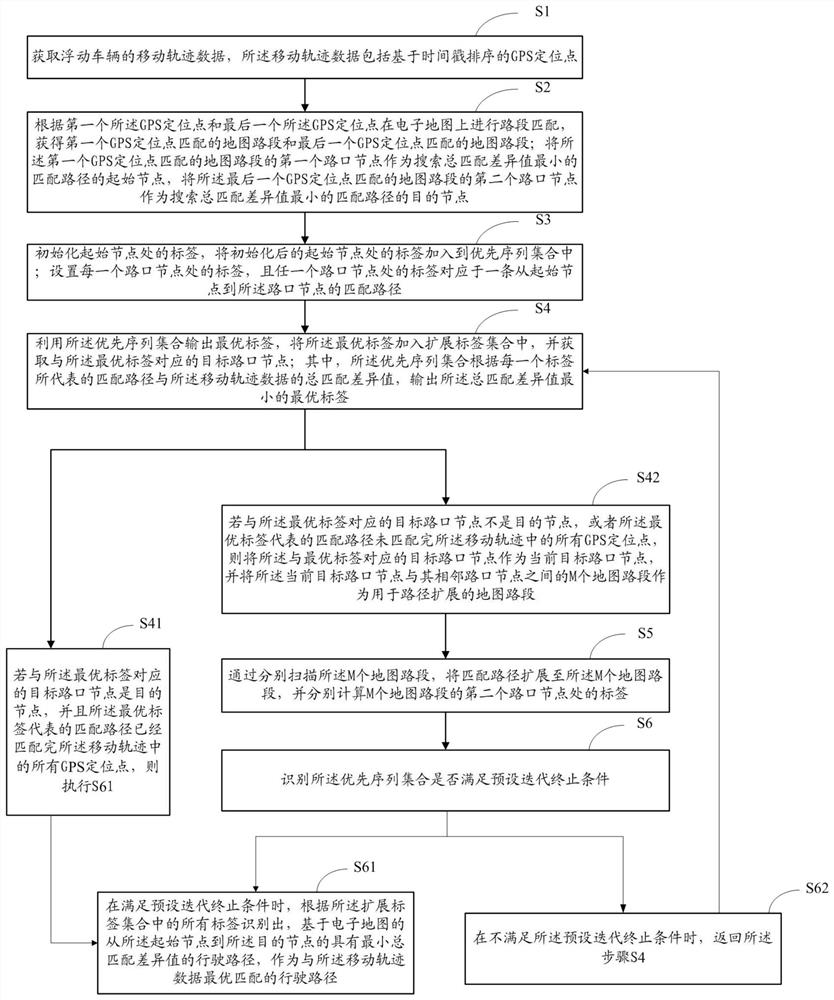
[0067] Such as figure 1 As shown, the embodiment of the present invention provides an offline map matching method, figure 1 It exemplarily shows its implementation steps, including:
[0068] S1. Acquire movement track data of the floating vehicle, where the movement track data includes GPS positioning points sorted based on time stamps.
[0069] In the above step S1, when offline map matching is not performed, the movement trajectory data generated when the floating vehicle moves generally has positioning errors, that is, each GPS positioning point in the movement trajectory data cannot be well aligned with the vehicle on the electronic map. The road segments of the maps that are actually driven are matched, for example, the projections of the two cannot overlap.
[0070] S2. Carry out road segment matching on the electronic map according to the first GPS positioning point and the last GPS positioning point, and obtain the map road segment matched by the first GPS positionin...
Embodiment 2
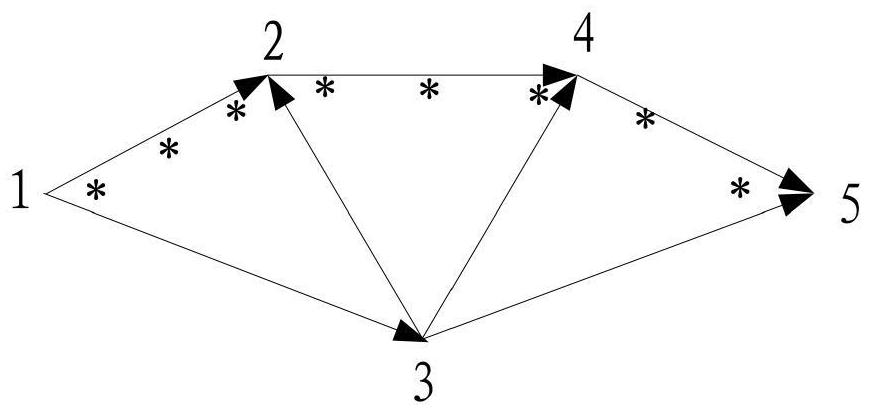
[0098] The embodiment of the present invention is used for supplementary description of step S5 in the foregoing embodiment. In the above step S5, if only based on the distance limit of 40 meters, the initially matched GPS positioning point with the scanned map road section may be controversial. Therefore, in the embodiment of the present invention, the GPS positioning point that has matching disputes is also identified and corrected. And calculate the matching difference between the corrected GPS positioning point and the scanned map road segment, so as to accurately calculate the label at the second intersection node of the scanned map road segment.
[0099] Therefore, in the embodiment of the present invention, in the above step S5, before obtaining the GPS positioning point that initially matches the scanned m-th map road segment, it is first necessary to define the scanned map road segment, including:
[0100] Define the starting node as s, the scanned map road section as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com