Interoperation middleware testing system and method for heterogeneous mobile robots
A mobile robot and testing system technology, applied in the field of mobile robots, can solve problems such as shortage, and achieve the effects of user-friendly, simple use process, and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
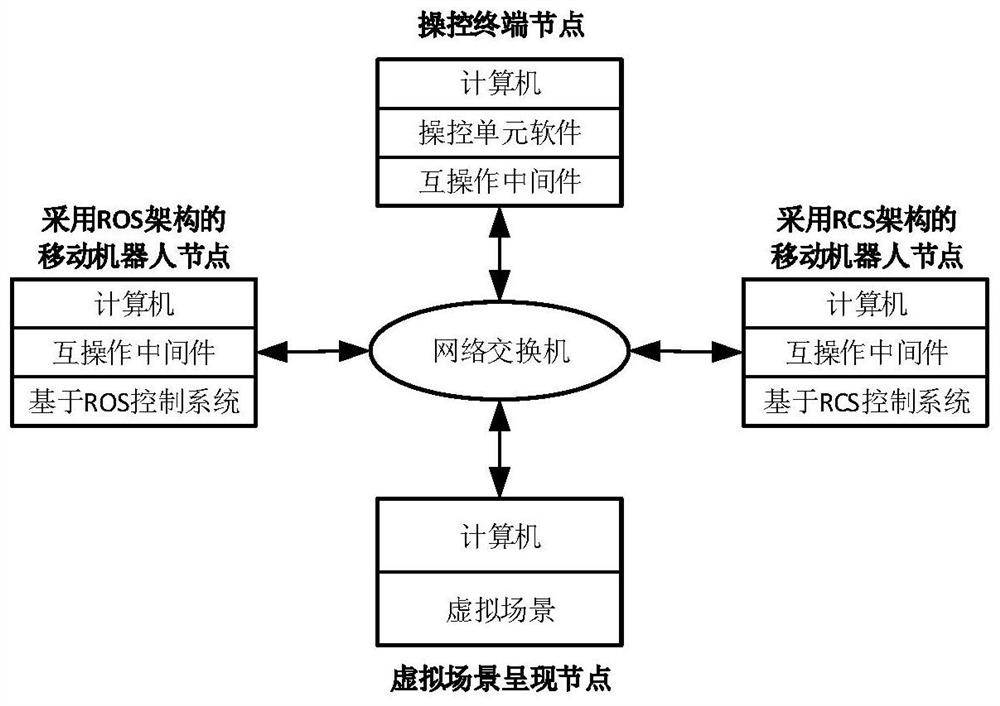
[0048] Such as figure 1 As shown, the interoperability middleware test system for heterogeneous mobile robots, the system includes four parts: the control terminal (OCU), the mobile robot node using the RCS architecture, the mobile robot node using the ROS architecture, and the virtual scene presentation node.
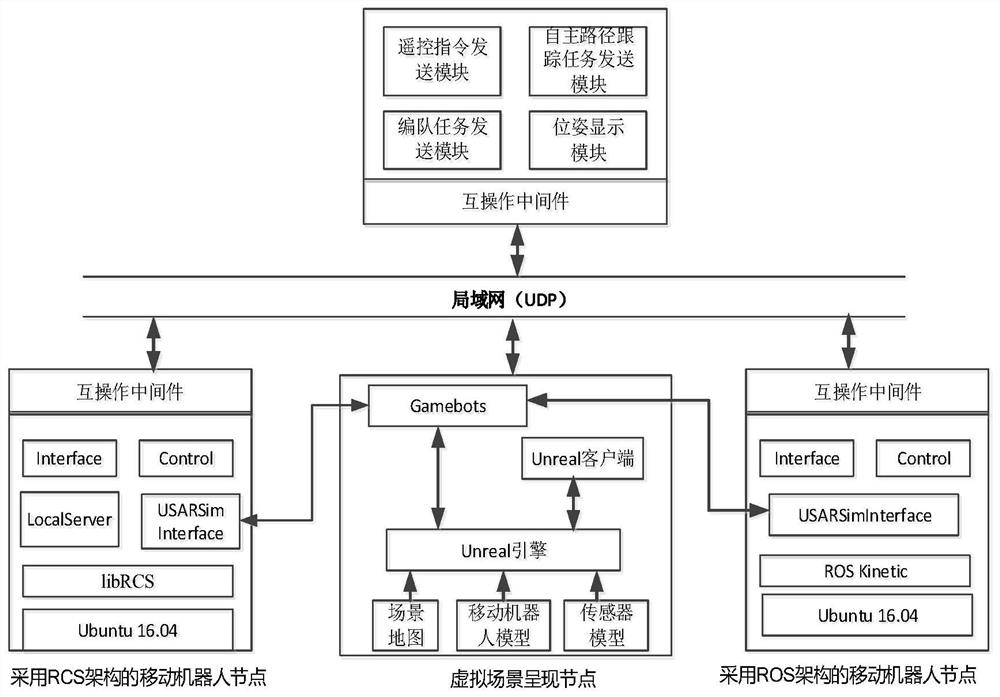
[0049] The control terminal mainly sets the working mode of the mobile robot, and can send tasks and remote control instructions to the robot, and receive and display the status information fed back by each mobile robot. According to functional requirements, it consists of four parts: remote control command sending module, autonomous path following task sending module, formation task sending module and pose display module.
[0050] (1) The remote control command sending module is mainly used to test the motion response ability of a single mobile robot. In remote control mode, it controls the motion of the mobile robot in the USARSim virtual scene by selecting the IP a...
Embodiment 2
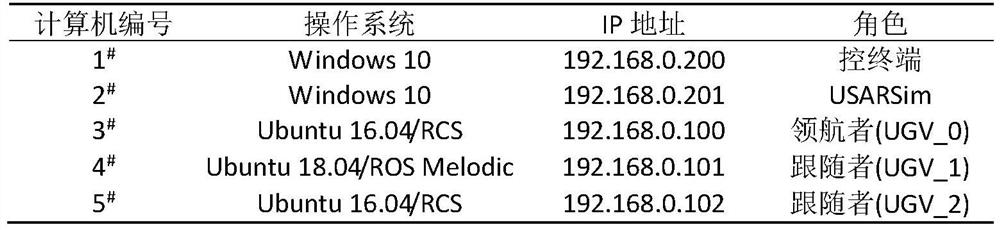
[0071] The present invention is used for interoperability middleware performance test, and five computers are configured, one of which runs the control terminal, one runs the USARSim virtual simulation scene, one computer is used as a mobile robot node adopting ROS architecture, and the other two are used as The specific configuration of the mobile robot node of the RCS architecture is shown in Table 1.
[0072] Table 1 Simulation test hardware configuration
[0073]
[0074] The test process steps are as follows:
[0075] Step 1: Load three ground unmanned platform models in the USARSim virtual simulation scene. The drive form of the model is four-wheel independent differential, and the translational velocity and angular velocity are used as input for control.
[0076] Through the setting of the control terminal, specify UGV_0 as the leader, UGV_1 and UGV_2 as followers, set the formation information d1=15m, d2=15m, φ1=5π / 3, φ2=π / 3, and send it after setting Formation ta...
Embodiment 3
[0080] The motion responsiveness of individual mobile robots can be tested in isolation. The basic workflow is as follows:
[0081] Step 1: Construct the robot model in USARSim, including the solid model displayed in the scene, the class used for platform control (written in Unreal Script scripting language) and the sensor configuration scheme of the platform;
[0082] Step 2: The remote control instruction sending module sends the desired linear velocity v and angular velocity ω to the corresponding mobile robot controller, thereby controlling the movement of the mobile robot in the USARSim virtual scene;
[0083] Step 3: Evaluate the correctness and real-time performance of remote control instructions received by robot nodes during the task execution process.
[0084] In summary, the present invention relates to a heterogeneous mobile robot interoperability middleware testing system and method. The system includes a control terminal node, a number of mobile robot nodes with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com