Comprehensive global path planning method based on lunar surface digital elevation map
A technology of global path planning and digital elevation, applied in the direction of integrated navigators, navigation calculation tools, etc., can solve the problems that the distance cost, terrain cost and sun illumination condition cost cannot be considered comprehensively, and the search time of large-scale path planning is long, etc., to achieve Improve security and sunlight conditions, improve the effective light index, and shorten the search time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0066] A kind of comprehensive global path planning method based on the digital elevation map of the lunar surface described in the present embodiment comprises the following steps:
[0067] Step 1: Extract the topographic features of the lunar surface based on the lunar surface DEM map, which specifically includes the following steps:
[0068] The topographic information of the lunar surface in terms of slope, undulation and roughness is extracted from the DEM data respectively, and the topographic features in each window are calculated by rolling on the DEM map by setting a 3×3 rolling window.
[0069] The terrain slope θ can be calculated by the following formula:
[0070]
[0071] where f x , f y is the elevation change rate in the east-west direction and north-south direction of the central grid, and the calculation method is:
[0072]
[0073]
[0074] where H 1 -H 9 are the elevation values corresponding to the 9 grids inside the 3x3 window, and g is the...
Embodiment
[0109] a. Experimental environment
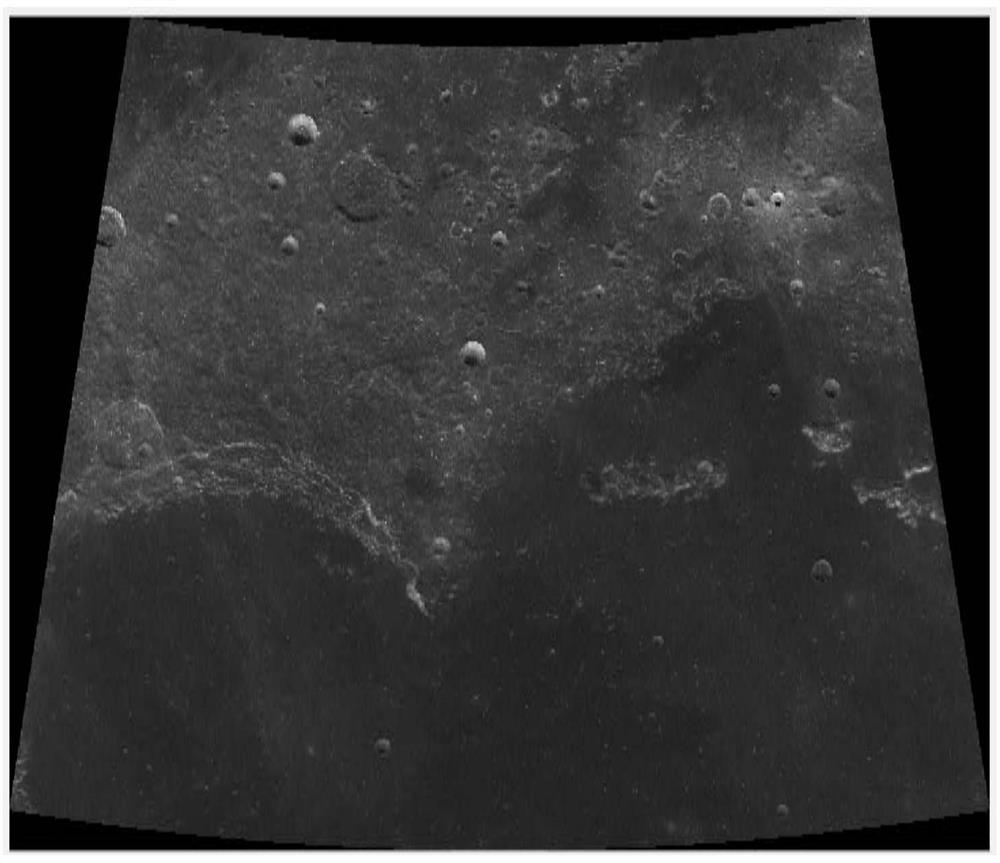
[0110]The present invention uses Chang'e-2 CE2TMap2015 data for lunar surface terrain processing. The CE-2 full-month topographic data product is different from other full-month topographic data products in terms of spatial resolution, full-month coverage, data continuity, absolute positioning accuracy, and detailed expression of landform structure. Compared with terrain products, it has obvious advantages. The Hongwan area near the Chang'e-3 landing site is selected as a large-scale autonomous detection simulation scene. The starting point of the mission is the Chang'e-3 landing site (44.12°N, 19.51°W), which is the eastern area of the Hongwan area, and the end point is selected as the northern part of Hongwan. area (55.5°N, 16.9°W), because the geological structure in this area is complex and typical, and has high scientific exploration value. The Chang'e-2 DOM image of the area near the Moon Rainbow Bay figure 1 shown.
[0111] The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com