Main hand end operating mechanism of vascular minimally invasive interventional surgery robot
A surgical robot and minimally invasive intervention technology, applied in the field of medical robotics, can solve the problems of no force feedback, large size, and inconvenient operation, etc., and achieve the effect of alleviating the tension of occupying space, speeding up the learning process, and simple and practical structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
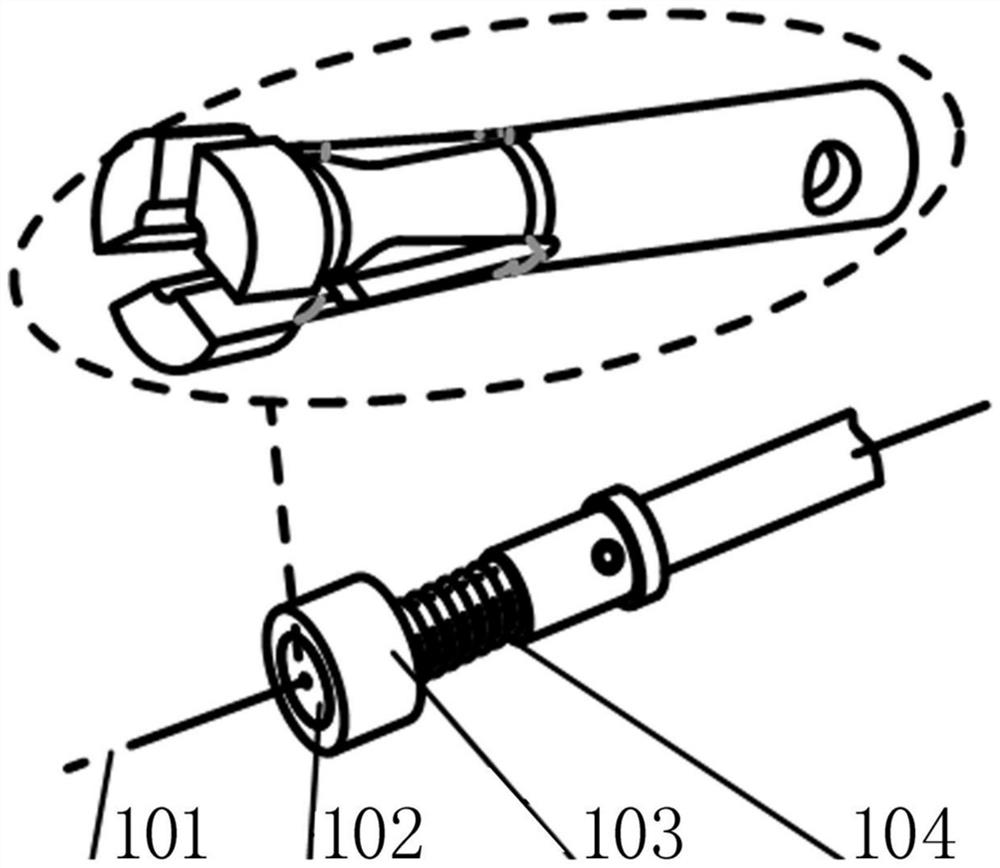
[0025] Example 1: A master-slave isomorphic vascular minimally invasive interventional surgery robot system, including a medical image navigation system, a master hand operating mechanism and a slave hand delivery mechanism containing a catheter / guide wire, the master hand operating mechanism passes The feedback force mechanism collects the doctor's operation information and transmits it to the slave hand delivery mechanism, and the slave hand delivery mechanism completes the intervention operation on the catheter / guide wire by tracking the position information of the master hand operation mechanism; the system is master-slave isomorphic , with force feedback, master-slave position tracking control functions, and the system's slave-hand delivery mechanism adopts a clamping claw mechanism that can be thrown and the clamping force can be adjusted.
[0026] Further, in this embodiment, as Figure 1-3 Shown: The feedback force mechanism of the system realizes the force feedback fu...
Embodiment 2
[0029] refer to Figures 1 to 3 , a master-slave isomorphic vascular minimally invasive interventional surgery robot system, including a medical image navigation system, a master hand operating mechanism and a slave hand delivery mechanism containing a catheter / guide wire, and the master hand operating mechanism passes a feedback force mechanism Collect the doctor's operation information and send it to the slave hand delivery mechanism, and the slave hand delivery mechanism completes the intervention operation on the catheter / guide wire by tracking the position information of the master hand operation mechanism; Feedback, master-slave position tracking control functions, and the system's slave hand-end delivery mechanism adopts a clamping claw mechanism that can be thrown and the clamping force is adjustable.
[0030] Further, in this embodiment, as Figure 1-3 Shown: The feedback force mechanism of the system realizes the force feedback function through the magnetic powder b...
Embodiment 3
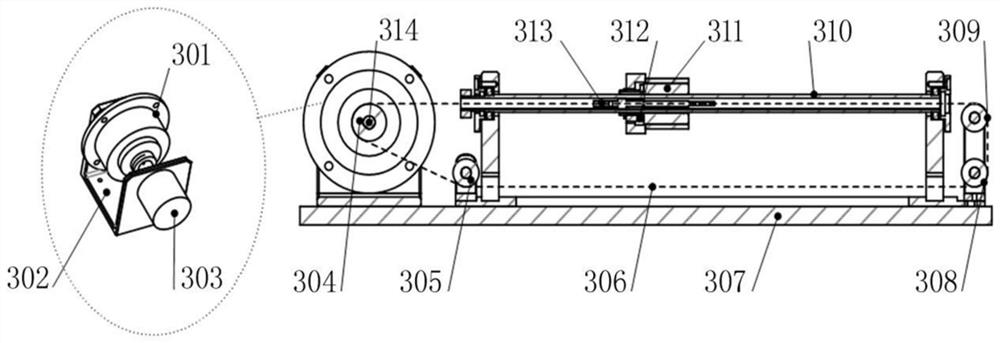
[0033] refer to Figure 1-3 , the principle is the same as that of Embodiment 1 and Embodiment 2, and further: the angular velocity of the disposable throwable clamping claw is the same as the linear velocity of the guide wire when it rotates, and the angular velocity of the guide wire is:
[0034]
[0035] In the formula, ω 2 — Angular velocity of catheter / guide wire (rad / s);
[0036] ν c ——Line speed of clamping claw (mm / s);
[0037] r 3 - Clamping claw radius (mm).
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com