Ship pose estimation method based on three-dimensional point cloud features
A pose estimation and 3D point cloud technology, applied in the field of signal processing, can solve the problems of inability to provide pose estimation, long running time, difficult operation, etc., and achieve the effects of shortening running time, improving computing speed, and saving storage space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
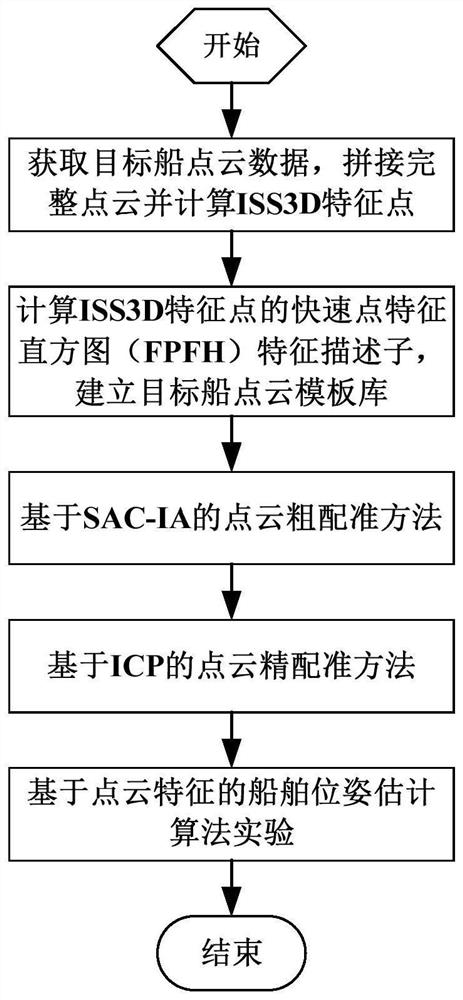
[0057] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0058] to combine Figure 1 to Figure 6 , the process flow of a pose estimation method for a three-dimensional point cloud of a ship proposed by the present invention is shown in the figure below. This patent first obtains the 3D point cloud data of the target ship from 6 directions, and adopts the splicing method to obtain the complete point cloud library of the target ship. Use the complete point cloud calculation obtained in the previous step to obtain the ISS3D feature points and their feature histograms, and build the point cloud template library of the target ship. Calculate the ISS3D feature points and their feature histograms of the point cloud of the target ship to be registered, use the SAC-IA point cloud registration algorithm, and use the feature histogram to match the point cloud template library with the feature points ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com