


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Marine obstacle recognition method and system based on binocular vision and radar
An obstacle recognition and binocular vision technology, applied in radio wave measurement systems, radio wave reflection/re-radiation, utilization of re-radiation, etc. and other problems to achieve the effect of making up for low ranging accuracy, light weight and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
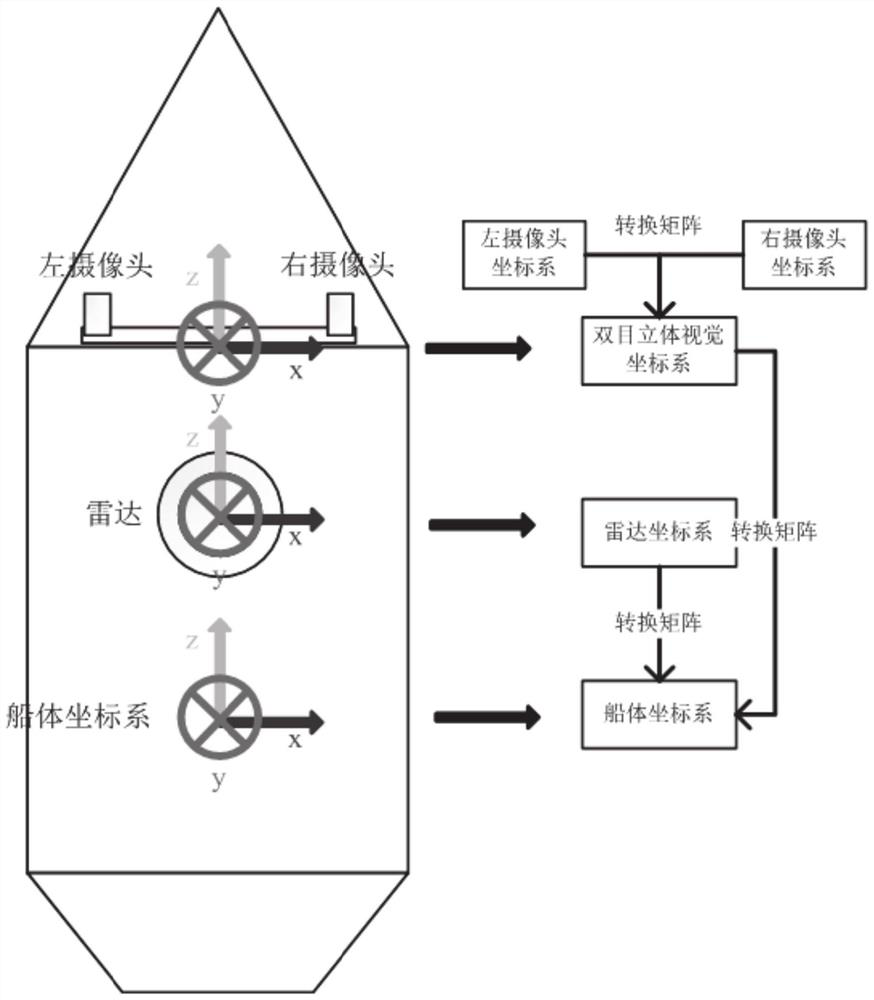
[0045] Such as figure 1 As shown, Embodiment 1 of the present disclosure provides a method for identifying obstacles at sea based on binocular vision and radar. Using binocular vision and radar sensor fusion can take advantage of the complementary advantages of the two sensors to complete the classification of obstacle targets and positioning tasks.
[0046]In this embodiment, by using the visible light camera in the optical sensor to acquire visible light images and perform target detection and classification recognition, on the one hand, the classification label of the target is obtained, and on the other hand, the area position of the target in the image coordinate system is obtained as the framed area of interest , and perform binocular stereo vision feature extraction and homonymous point matching algorithm in the frame selection area to perform three-dimensional reconstruction of the target; at the same time, the millimeter-wave radar sensor is used to detect the targe...
Embodiment 2
[0130] Embodiment 2 of the present disclosure provides a marine obstacle recognition system based on binocular vision and radar, including:
[0131] The data acquisition module is configured to: acquire binocular vision images and radar data, and perform time fusion;
[0132]The binocular visual recognition module is configured to: obtain the classification label of the target object according to the trained deep learning network model and the binocular visual image after time fusion, and obtain the position and speed information of the target object after three-dimensional reconstruction of the target object;
[0133] The radar data processing module is configured to: obtain the position and speed information of the target object according to the time-fused radar data;
[0134] The data fusion module is configured to: spatially fuse the position and speed information of the target object obtained by binocular vision and radar, respectively, and match the space-fused data to o...
Embodiment 3
[0138] Embodiment 3 of the present disclosure provides a marine obstacle recognition system based on binocular vision and radar, including an optical sensor, a radar sensor and a processor;
[0139] The optical sensor is configured to collect binocular vision images, the radar sensor is configured to collect radar data, and the processor includes:
[0140] The data acquisition module is configured to: acquire binocular vision images and radar data, and perform time fusion;
[0141] The binocular visual recognition module is configured to: obtain the classification label of the target object according to the trained deep learning network model and the binocular visual image after time fusion, and obtain the position and speed information of the target object after three-dimensional reconstruction of the target object;
[0142] The radar data processing module is configured to: obtain the position and speed information of the target object according to the time-fused radar data;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com