A Pose Measurement Method Based on Semantic Segmentation and Kalman Filter under Monocular Vision
A Kalman filter and semantic segmentation technology, applied in the field of visual measurement, can solve the problem of uneconomical solution of the pose measurement of the set card, high installation difficulty of the camera, easy installation errors and other problems, achieving low installation difficulty, low cost, The effect of fast and accurate card positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and examples in the description.
[0031] Such as Figure 1-5 As shown, a pose measurement method based on semantic segmentation and Kalman filter under monocular vision of the present invention, specifically includes the following steps:
[0032] Step 1: Customize a sheet according to the actual site size figure 1 As shown in the calibration board composed of square black and white grids, place the calibration board boundary parallel to the parking line on the ground to be tested, fix the camera to take 20 images, and use Zhang’s calibration method to obtain the camera’s internal parameter matrix K, external parameter matrix R and T, and select one of the clear images to calculate the conversion matrix M from the image coordinates of the camera corresponding to the image to the ground coordinates to be measured;
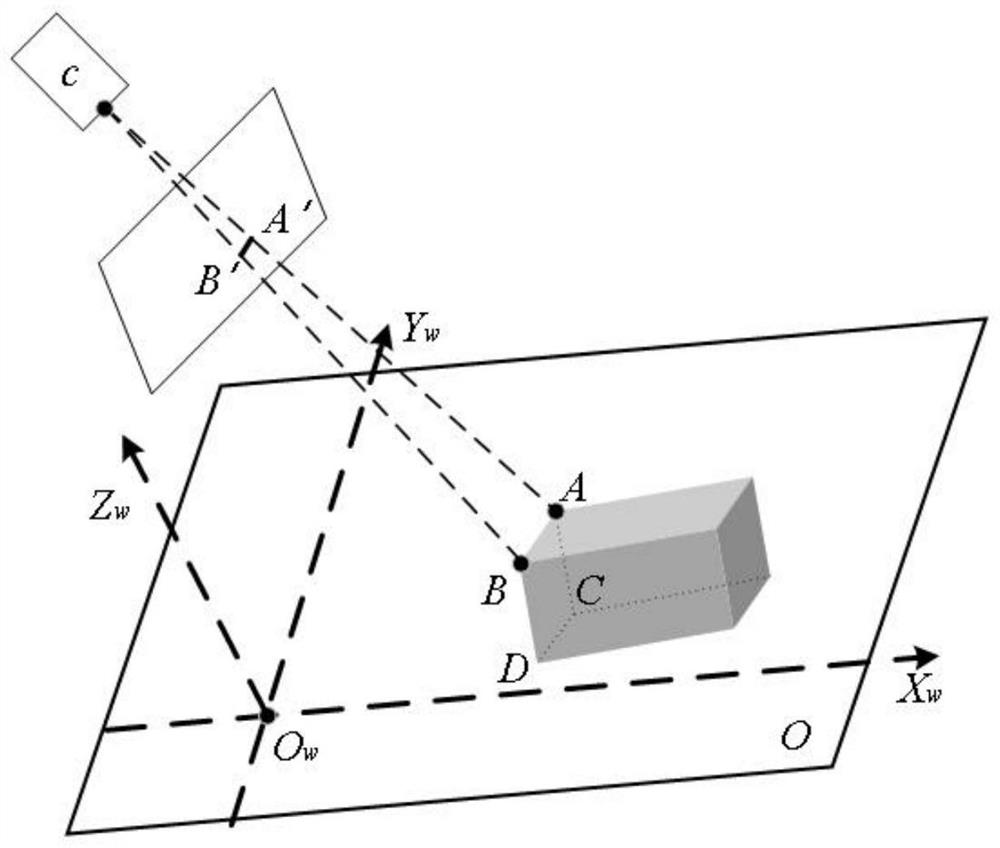
[0033] Step 2: If figure 2As shown, the world coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com