A method and system for automatic driving decision-making control based on layered reinforcement learning
A reinforcement learning and automatic driving technology, applied in machine learning, control devices, instruments, etc., can solve problems that cannot meet the decision-making and control requirements of automatic driving, and achieve training that is easy to complete, training tasks are clear, and rapid acceleration and deceleration can be avoided Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below with reference to the accompanying drawings, but the protection scope of the present invention is not limited thereto.
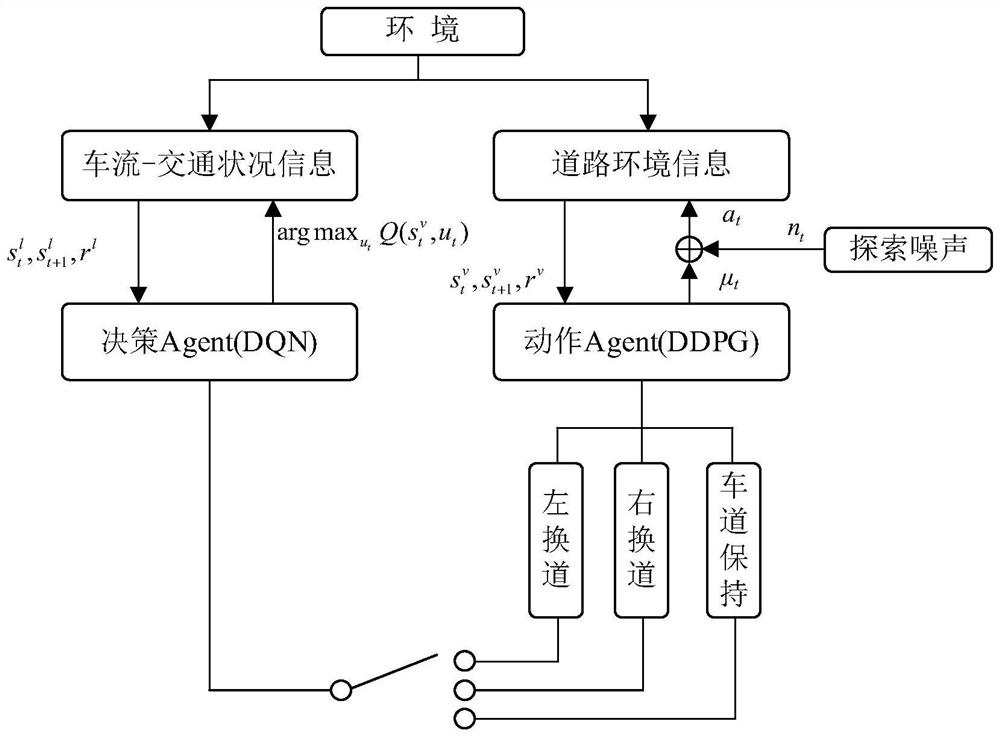
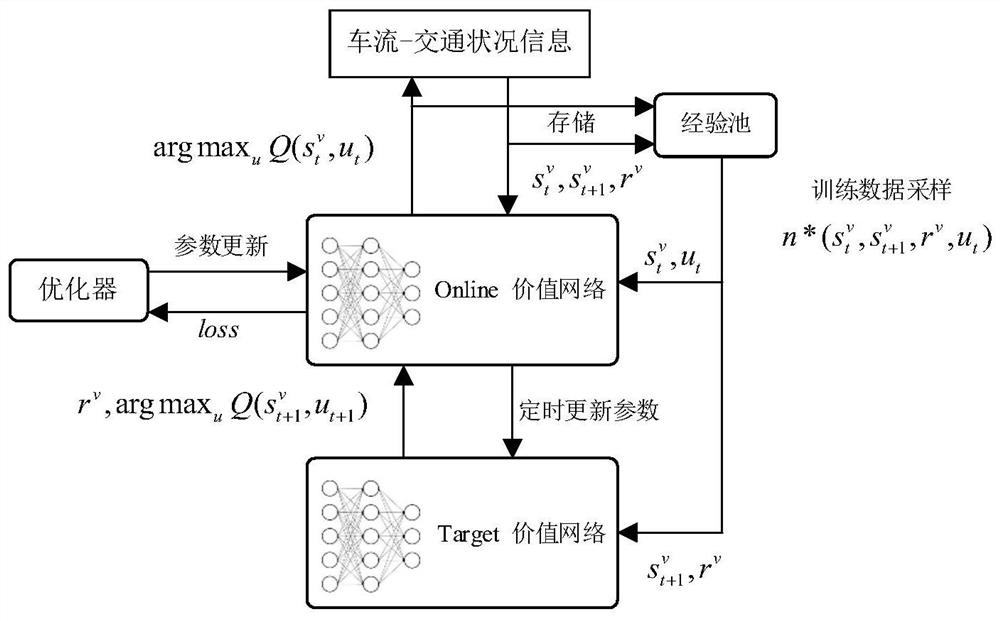
[0040] figure 1 It is a flowchart of an automatic driving decision-making control method based on layered reinforcement learning, and the method of the present invention includes an action layer Agent and a decision-making layer Agent, as follows:
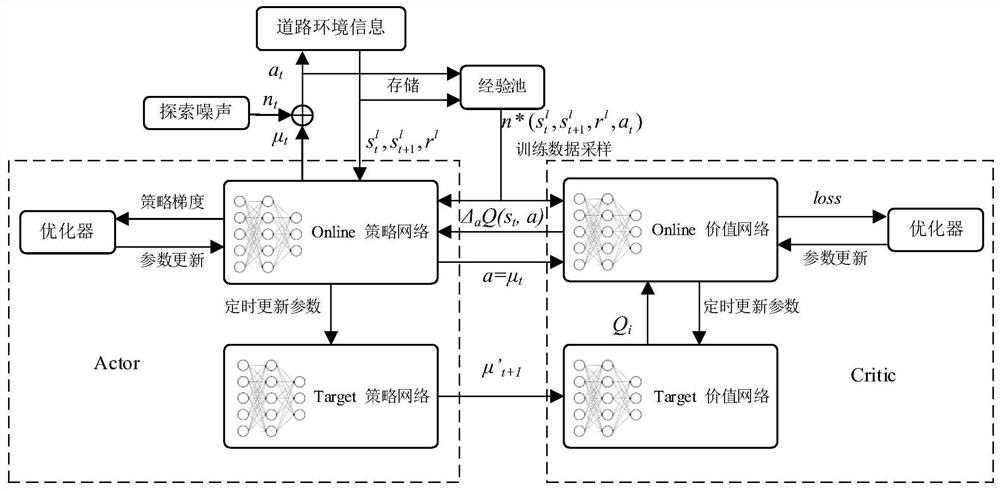
[0041] Action layer Agent obtains road environment information through environment interaction The action layer Agent obtains the state quantity After that, a definite action μ is obtained t , and then determine the action μ by giving the t an exploration noise n t , to synthesize an exploratory action a t . The smart car is performing an action a t Feedback from the environment and r l . Feedback amount is the new state quantity, r l to perform action a t rewards received afterwards. By changing the task, the action layer Agent learns...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com