A ball picking robot
A technology of robots and basketball baskets, applied to rackets, balls, loading/unloading, etc., which can solve the problem of getting between the two blades of the first rotating impeller, reducing the picking success rate and picking efficiency, and long picking time of table tennis balls And other problems, to achieve the effect of reducing the number of use and the weight of the whole machine, improving the efficiency of ball picking, and improving the reliability and stability of operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with accompanying drawing:
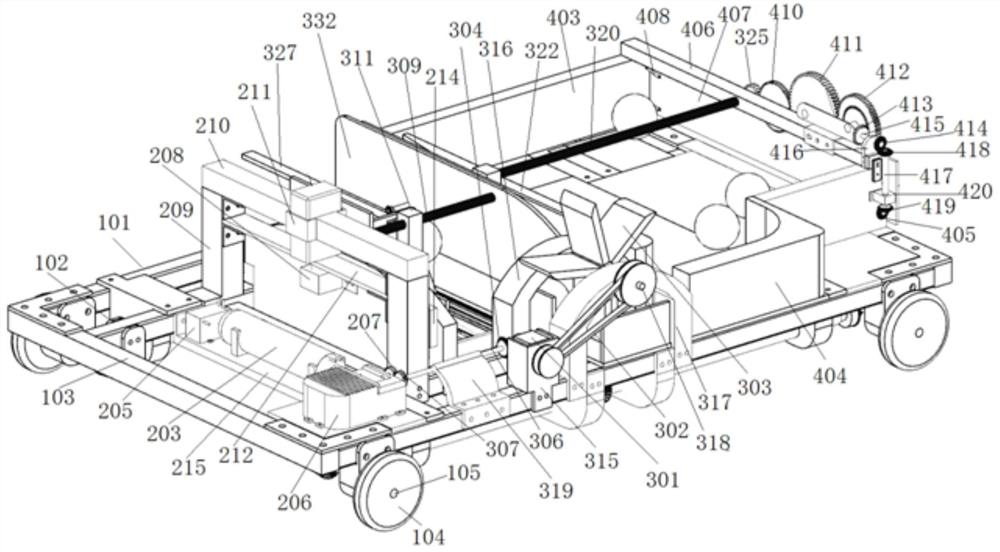
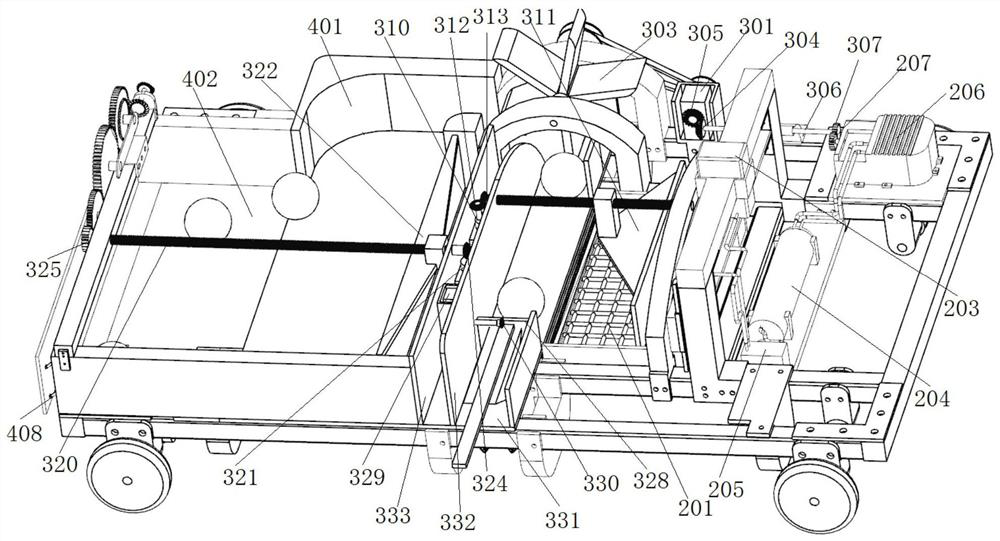
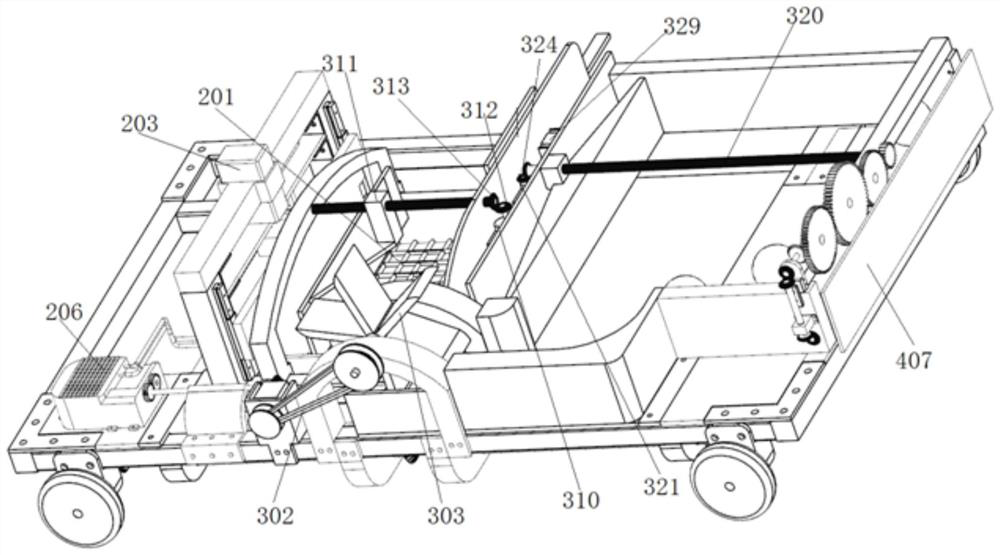
[0039] Such as Figure 1-Figure 6 A ball picking robot shown includes a walking mechanism and a ball picking mechanism, a ball pushing mechanism and a ball storing mechanism installed on the walking mechanism.
[0040] The walking mechanism includes a vehicle frame 101, several wheel assemblies mounted on the vehicle frame 101, and a transmission assembly 2 for driving the wheel assemblies to rotate. The vehicle frame 101 includes an outer frame 102 and auxiliary parts 102 arranged in the outer frame 101 . The vehicle frame 101 is made of steel, which improves the structural strength and plays a stable supporting role for other mechanisms. The wheel assembly includes a wheel 104 , a wheel axle 105 and a gear five sleeved on the wheel axle 105 . Both ends of the wheel axle 105 are fixed on the vehicle frame 101 through a wheel axle bracket 107 respectively, and the wheel ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com